-
Captain: Dhruv Rao ‘22
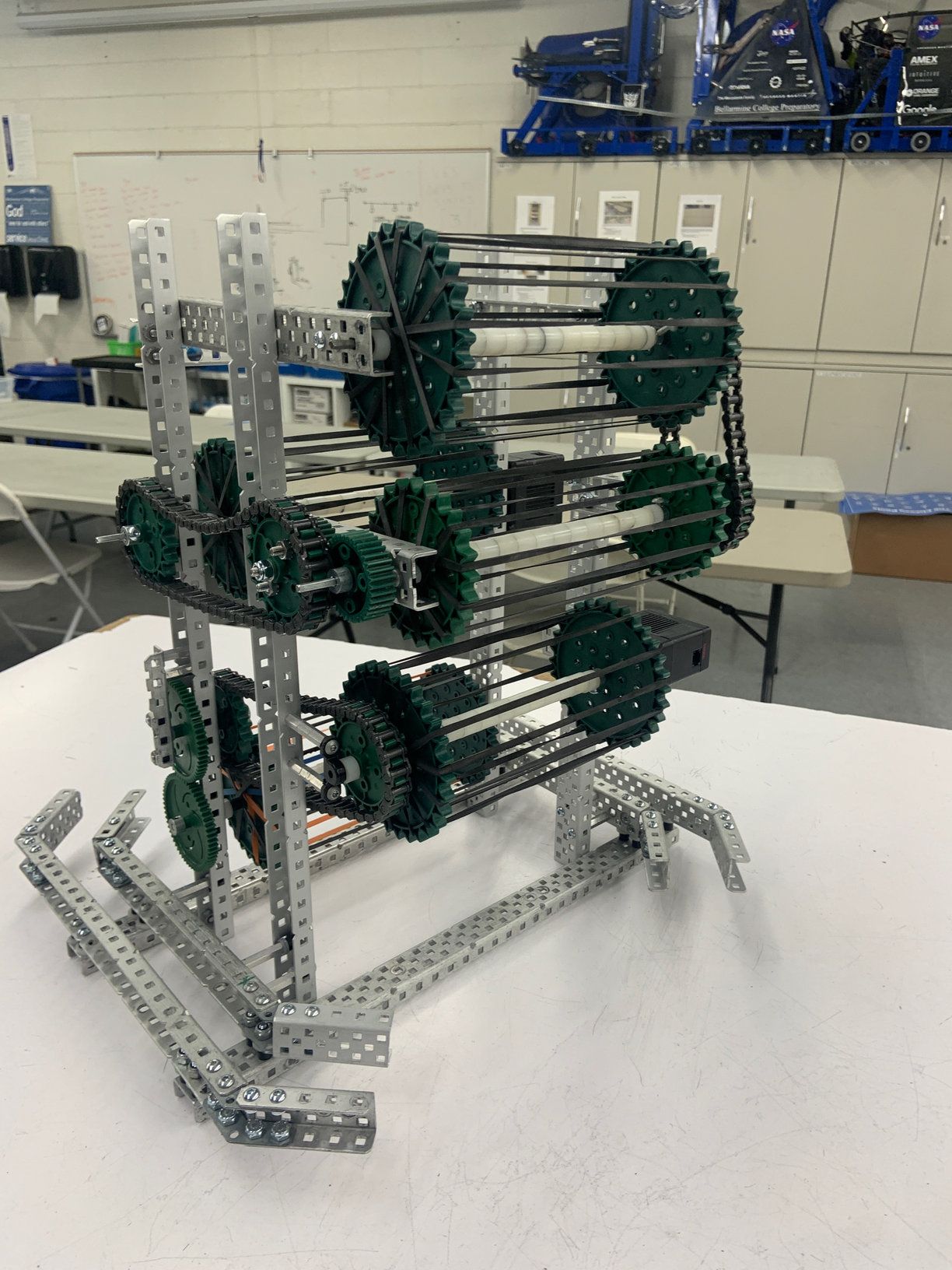
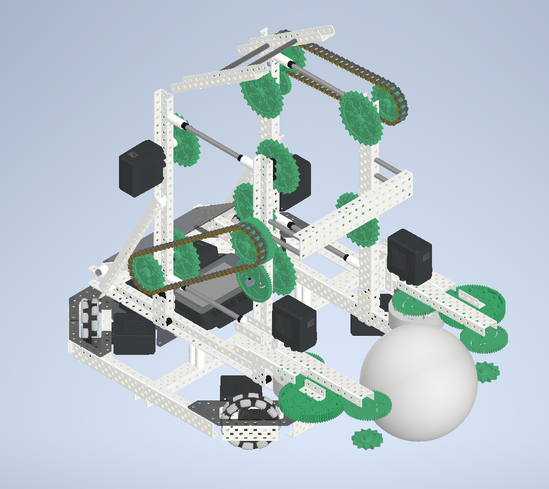
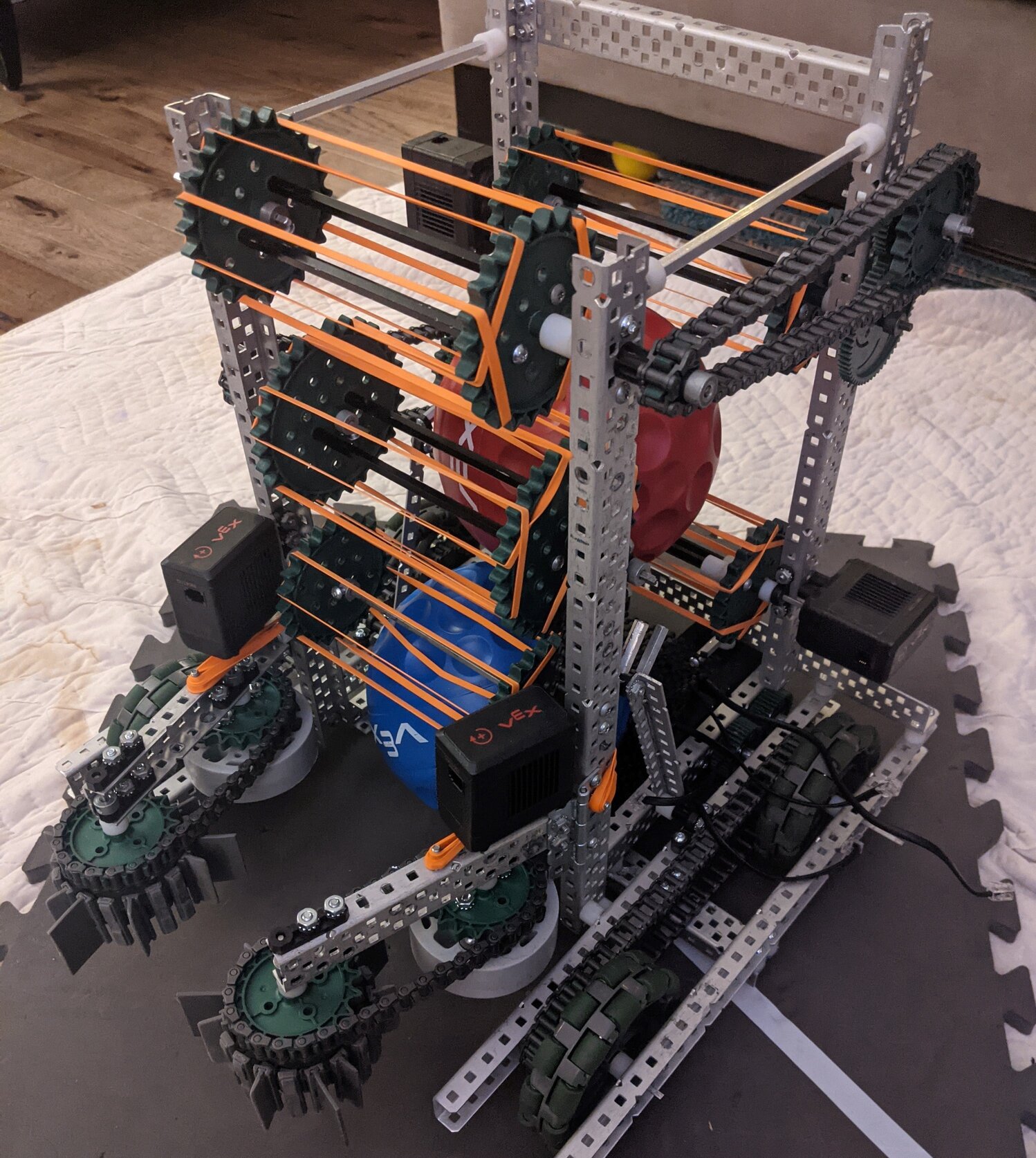
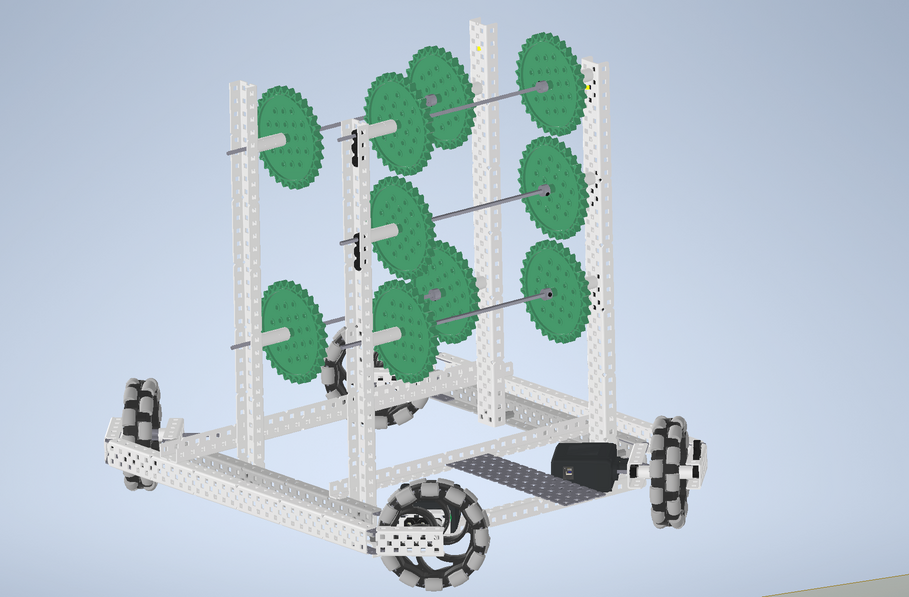
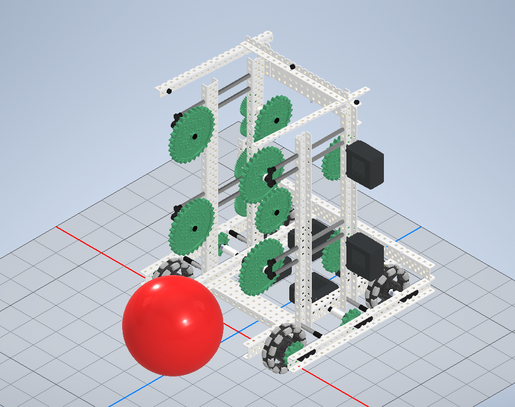
Our robot will be a 4-wheel X-drive for improved speed and maneuverability, and attached to the drivebase will be an intake mechanism composed of sprockets and rubber bands that will be able to intake balls from the bottom of the tower. The tower on our robot will be an ascending set of gears and rubber bands chained together which will progressively help push balls to the top, where a final rubber band set will push them into the tower. In terms of building at home, our team has had to adjust somewhat to designing and building online, rather than in the lab, designing through calls and online rather than in person. We have worked on the CAD extensively since the start of the year, and we plan to obtain parts from the lab and start building at home in the new year.
-
Captain: Matt Morrison ‘22
While designing our robot, we looked for designs that give us the ability to score as quickly as possible. Our drive base is an X-drive meaning it can move in 4 different directions. A ball ejector in the back lets us continually cycle balls and flip-out intakes allow for maximum reach and optimal compression. Meeting virtually as a team multiple times per week has given time for design discussion and making sure our team stays on track. This robot has been a lot of fun to make and it helps us keep in touch with friends in robotics.
-
Captain: Alexander Kwandou ‘21
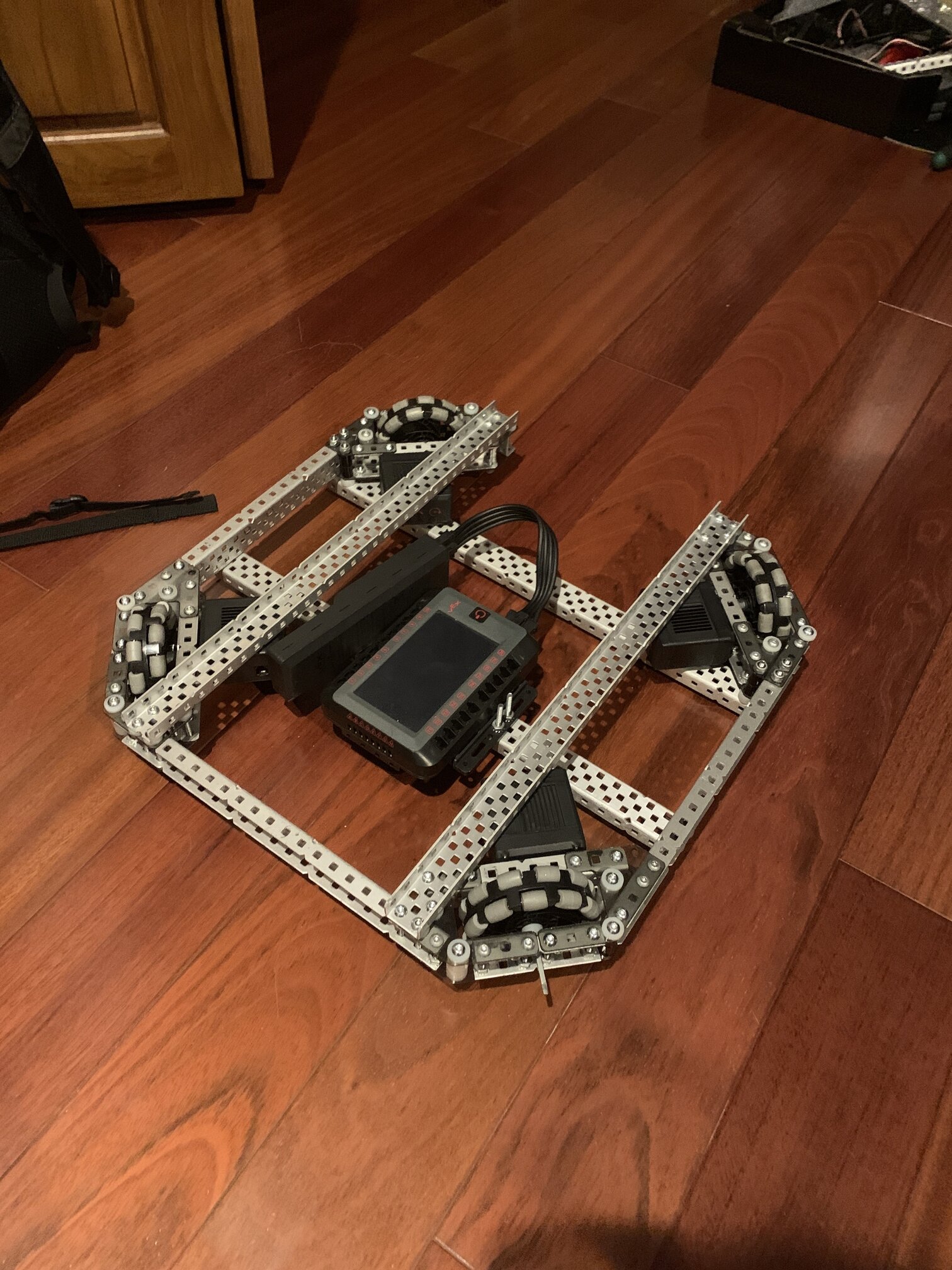
Over the past few weeks, we have been researching into different subsystems and game strategies while utilizing CAD to construct our ideas and plan the robot out before building. After our discussions, we have consolidated on building an x-drivebase with a roller system that will allow us to intake and eject balls at the same time. We chose the x-drive design for our drivebase because it provides us with the capability of strafing sideways while traveling in the cardinal directions, making it easier for our driver and programmer to use. In addition, for our x-drive system we sought to utilize custom polycarbonate pieces that would allow us to have a much more compact and sturdier drivebase. We CADed those pieces and used a laser cutter to cut them for our robot. In our last week of in-person builds, we were planning to take home parts for building the robot at home, however the lab was closed unexpectedly and we weren’t able to get any of the necessary parts. Next semester, we plan to implement a tracking methodology called “odometry,” which uses APS (Absolute Positioning System) wheels to track movements in the cardinal directions and the rotation of the robot. We have consolidated on a design for the APS wheels and we plan to build them and attach them to our robot next semester.
-
Captain: Jonas Ekuan ‘21
Team 254E has decided to design and build a snail bot with a rear exhaust system for this year’s game due to its ability to manipulate both its alliance and opponents colored balls without having to drive away from the goal when trying to toggle the controlling color of the goal. The team has also decided to build an X drive due to there being no obstacles on the field, allowing for more defensive and offensive intaking and positioning options during a match. Some key features 254E’s snail bot offers compared to others is a front hardstop and well placed front tread intakes and rear flex wheels for easy side, corner, and middle goal manipulation. It also features custom polycarbonate electronic mounts to allow for as even weight distribution as possible due to the robot’s already lightweight and thus heavy components like the battery and brain having a big effect. In terms of strategy, 254E wants to spend most of their time practicing driving and programming runs as soon as their robot is built to get in competition as soon as possible.
-
Captain: Nolan Jeung ‘21
254J started with a simpler robot design, and added onto it throughout our design process. We want to focus on cycling balls quickly while having a simple and easy to build design. We designed a tank drivebase to fit around the goals, and intakes that start within the sizing limit to improve our consistency each match. We also designed an exhausting system to eject balls of the opposite color so we can cycle balls quicker and not put other balls in our way while driving around.
Due to at home situations, we have been primarily CADing and programming the robot together, but have had some opportunity to build at home.
-
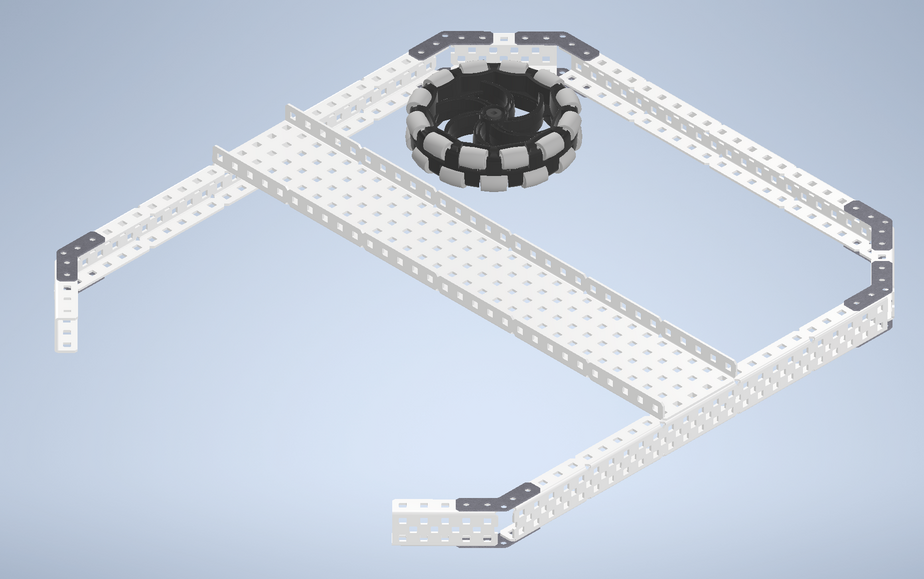
Captain: William Solovei ‘21
Our team has finished CADing the drive base and are almost done CADing the lift. Our next step is to motorize the lift and chain the sprockets together. We have also divided up and created code for the robot, and once we have access to the lab again, then we will test the code on our robot. Further, I, the captain, put an emphasis on making the robot “freshman built” meaning that while I instructed and taught them how to build the entire robot and code. I didn’t CAD or code a single thing. Rather, I watched them do it and overtime tried to help them less and less so they could figure it out and be more independent with their build.
-
Captain: Andrew Tan ‘21
Our team has worked on understanding how to create each part of the robot through CAD step-by-step. We are almost in the phase of completing CAD and are anticipating full-on build by mid-January. Our prototyping has been cut short by campus closure, but we hope to get progress by finishing up CAD design and rotating more team members into the lab.
Our robot is a basic tank drive with four rollers, a hood, and a flip-around intake (intake in progress).