
Build Blog Day 11 (1/24/18)
Elevator
Task: Design Elevator Cartoon CAD
-
The previous issue with Option B was the issue of the spool not being low enough if we directly mounted it on the shifter shaft. To address this issue, we decided to add a 1:1 reduction to lower the spool down. We also talked about the horseshoe. The horseshoe allows us to drop the intermediate stage as low as possible such that we can score our cube safely into the exchange.
Option A:
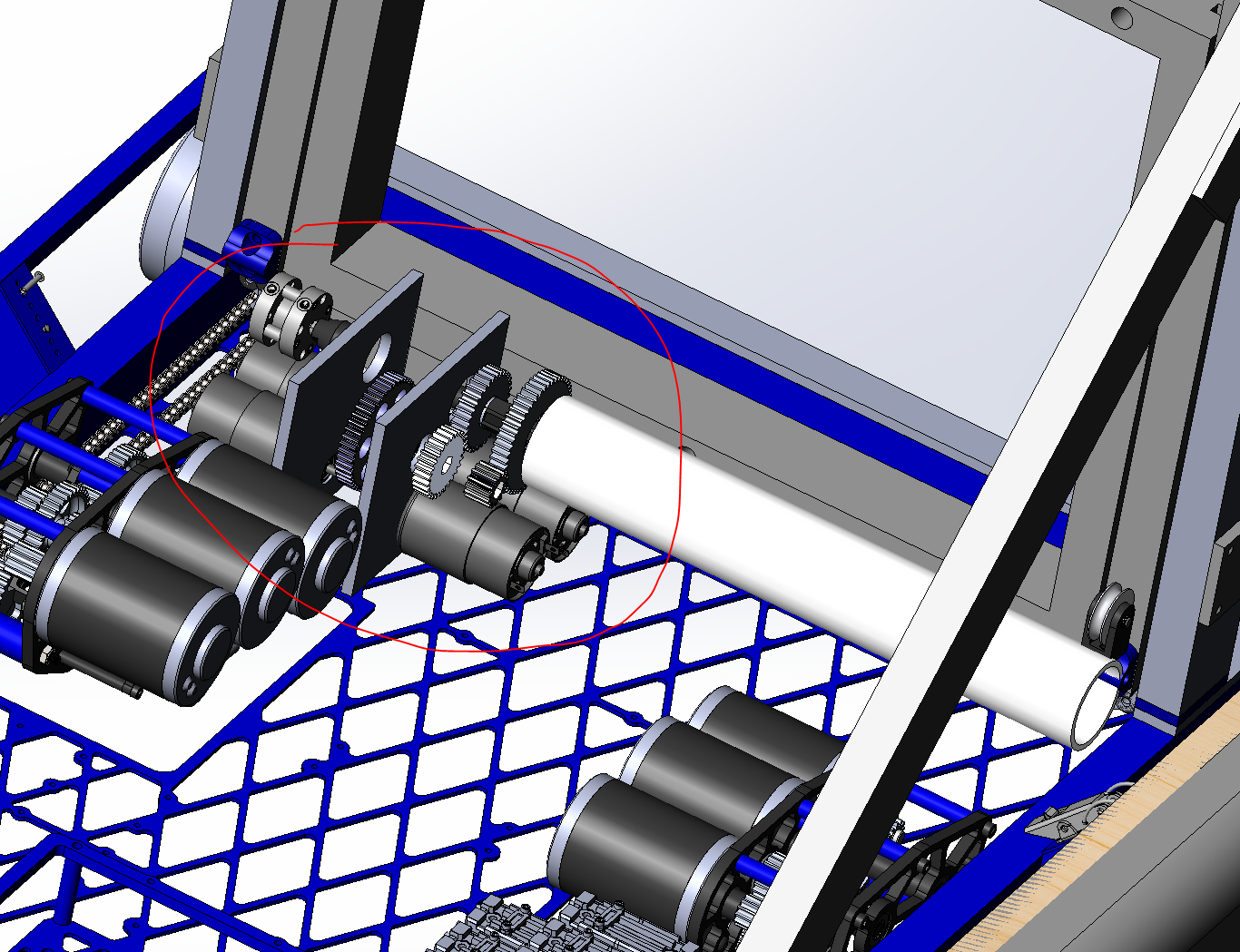
Option B:
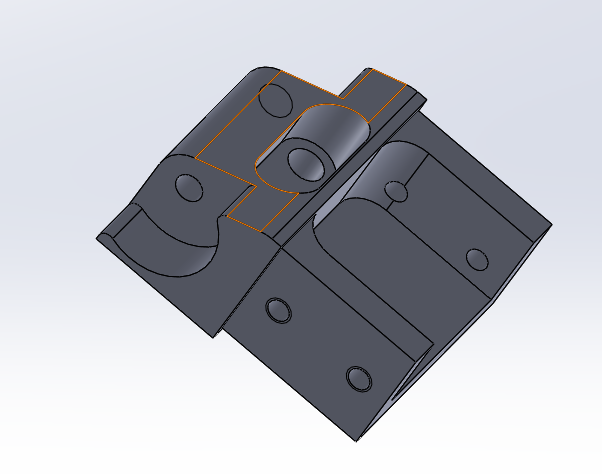
We also designed new bearing blocks to allow us to save an inch of space between the vertical and horizontal tube of the intermediate stage.
Forklift
Task: Finish Forklift CAD
-
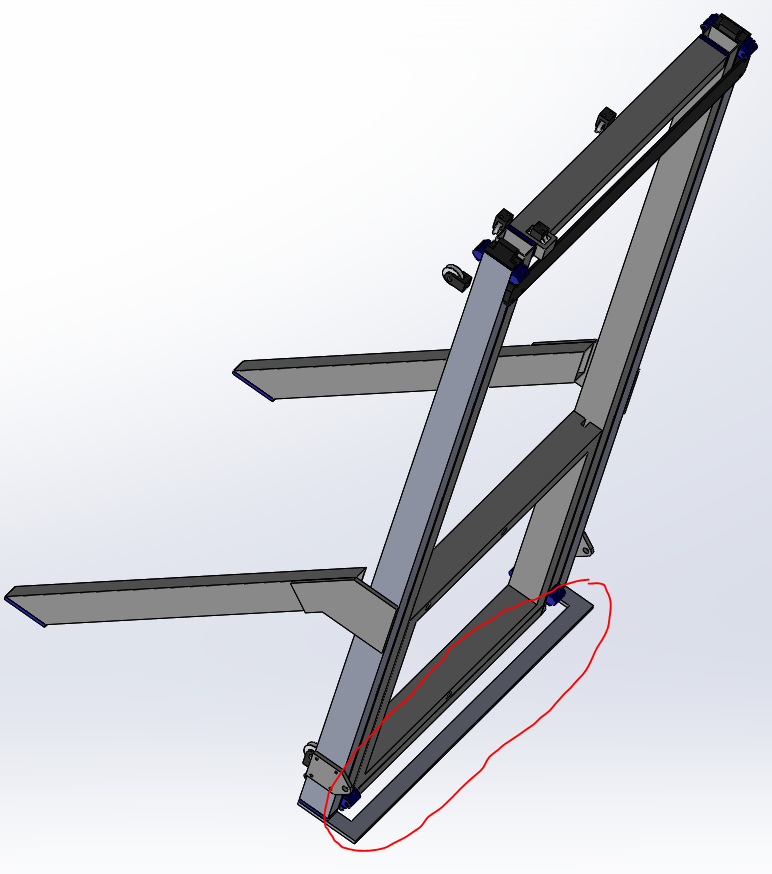
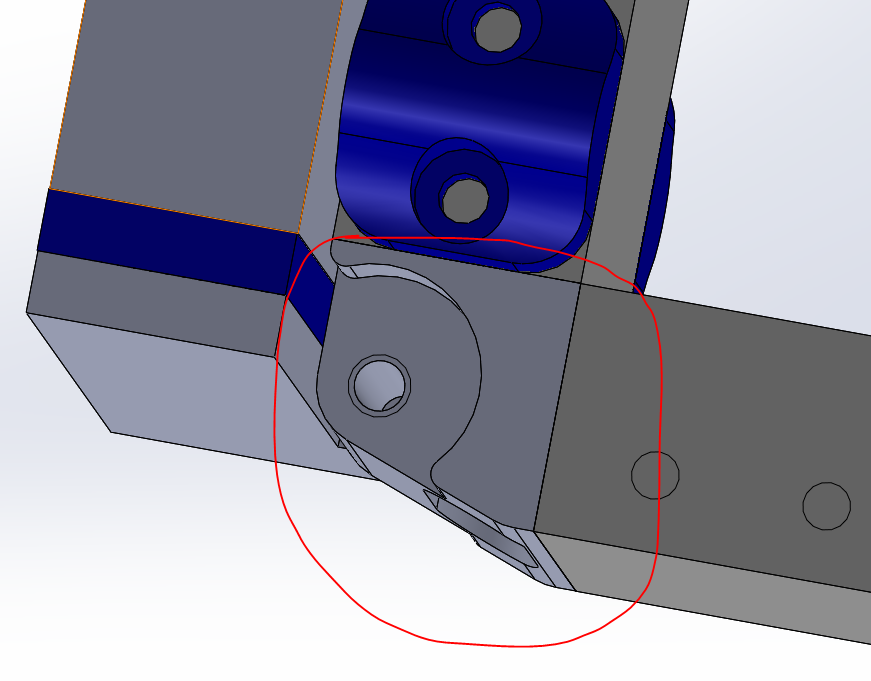
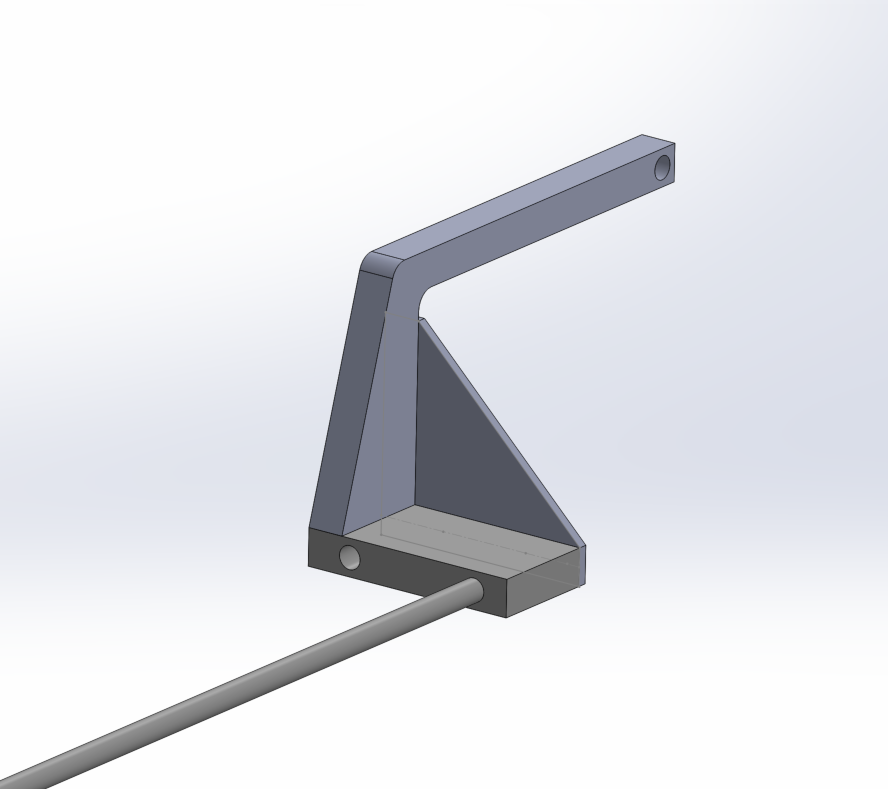
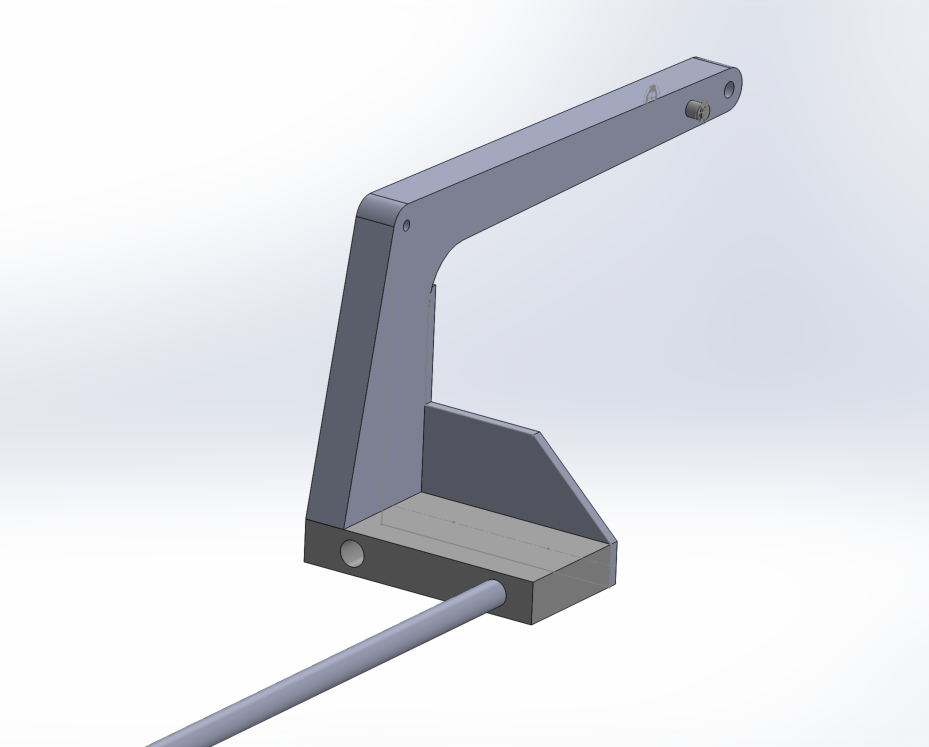
At Wednesday's build, we worked on further detailing the forklift arm. More specifically, we added a point to the back of the arm where surgical tubing could hook onto it and in-effect spring load it downward when we are ready to climb. We also beefed up the main arm and added a pivot point just above the downward 90 degree angle of the arm, which will later serve as an attachment point for a tensile member that will help support the whole arm when we are lifting another robot. Finally, we added a small notch in the triangle brace to allow room for the elevator superstructure. Moving forward, the plan is figure out how we will release the arm from a stowed position, and run a simulation to make sure the arm can support another whole robot.
Before:
After:
Intake
Task: Decide on a final intake prototype
-
Yesterday, we decided to switch up the intake design and started designing an intake that uses several 2" compliant Andymark wheels as opposed to the 4" we had been using so far. We began designing it in cad but have not laser cut it yet.
Programming
Task: RPLIDAR Driver
-
We got the RPLIDAR to output data to Network Tables, and can now access it from the node.js server. However, there are still some bugs to be fixed – for example, the data stops sending after a certain amount, and we will need to look into the problem more to find out why. Also, we will need to parse and send the data from the node.js server to the visualizer to complete the transfer of data from RPLIDAR to visualizer. Meanwhile, we also researched more line detection methods and are working on finding the best one for our purposes.
