
2019 FRC Build Season Blog
Chezy Champs 2019
A Brief Summary
As part of an eventful weekend, we hosted Chezy Champs, our annually hosted offseason tournament at Bellarmine College Preparatory, in our hometown of San Jose, CA. We had a great time jumping back into action with our robot, Backlash, before the start of the 2020 FRC Season. Alongside, Team 3647 Millenium Falcons, Team 971 Spartan Robotics, and Team 5700 SOTA Cyberdragons, we were able to win the tournament!

Team 254 and alliance partners Team 971 climb the HAB at the end of an elims match
Event Summary and Highlights
Robot Performance

Backlash scores cargo into the rocket shop during a quals match
Throughout our qualification matches, we sought to earn the maximum number of ranking points, which meant prioritizing scoring in the rocket in every match to get the rocket RP, as well as climbing and scoring enough points to win. We employed a new rocket RP scoring style that allowed us to utilize our partners well. Since opposing defense was much better at Chezy Champs, we focused on the top two levels of the rocket and let our partners score on the first level. The HAB RP was a bit harder because of the increased point requirement. Thus, we made sure to always climb successfully and also get our partners to park on the platform. We consistently scored double climbs in our matches.
By the elimination period, we focused on simply winning our matches. We scored as many points as possible by scoring as many cargo balls as possible since they were worth more than hatches. We wanted to score enough hatches such that we had multiple points to score at any moment and avoid getting caught up by defense. We ran our cargo ship autonomous program to place hatch panels on the first two side slots of the cargo ship and then filled the rocket during most of our matches. Sometimes, we switched between the task of scoring hatches and cargo with Team 971 to confuse defensive opponents.
Alliance Selection
Going into the elimination period, we chose to form an alliance with Team 3647 Millenium Falcons, Team 971 Spartan Rootics, and Team 5700 SOTA Cyberdragons.

Team 254 representative, Safwaan Khan, poses with our chosen alliance partners
A Special Thanks
At Chezy Champs, we would not have been able to be so successful without the amazing teams that we were able to work with during our matches. Also a special shout out to our pit crew and drive team for properly maintaining our robot during the tournament. We would also like to highlight the efforts of our alliance readiness crew to keep our alliance partners ready throughout the tournament. Team 254 would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, teachers, and parents who supported us and helped us succeed in this tournament.

Members of Team 4183, Bit Buckets Robotics, hold up their newly acquired Chezy Champs swag

254 member, Safwaan Khan, in action as a scorekeeper

Drive team members, Jack Gnibus and Marcus Ma, enthusiastically clean up the field during a lunch break
2019 Technical Resources Release
Team 254 is proud to present the Technical Binder and Code Release for our 2019 Einstein finalist robot, Backlash. If you have any questions, feel free to comment on the respective Chief Delphi threads for our code release and our technical binder release.

2019 FRC World Championship
A Brief Summary
Last week, we attended the 2019 FIRST World Championship in Houston, Texas from April 17th to April 20th. Assigned to the Turing Division, we won the Division Championship Award and the Industrial Design Award sponsored by General Motors.After becoming the Turing Division Champions, we executed a well-planned strategy alongside FRC Team 3310 Black Hawk Robotics, FRC Team 6986 PPT Bots, and FRC Team 948 NRG (Newport Robotics Group), allowing us to earn the second place title at the 2019 FRC World Championship in Houston!

Team 254 poses for a picture at the Hall of Fame Lunch in the George R. Brown Convention Center
Robot Performance
Qualification Matches (Turing Division)
Throughout our qualification matches, we sought to earn the maximum number of ranking points, which meant prioritizing scoring in the rocket in every match to get the rocket RP, as well as climbing and scoring enough points to win. Since we were competing in the 2019 FRC World Championship, most teams could fill a rocket with cargo by themselves or with another team on our alliance, which made our strategy easier to execute. When we were with partners who could manage scoring on the rocket themselves, we primarily worked on distracting defense. Seeing as finishing a rocket is incredibly hard under defense, giving the other teams an open other side of the field allowed them to finish their rocket as we worked on ours. In other matches, where we did not have partners capable of finishing the rocket, we accomplished the task ourselves, while fighting through the defense the best we could. We also made sure to finish each of our matches by climbing onto the HAB, so we could get the HAB docking ranking point. Luckily, we were with many other level 3 climbers, allowing us to stay out in the field longer as they climbed, but we always attempted a double climb for more points with the new climber.
We also kept tiebreaker points in mind during our divisional qualification matches. If there happened to be a tie in ranking points, we always prioritized scoring cargo to boost that metric. It also worked well seeing that cargo balls are worth more than hatch panels.
Alliance Selection
Going into the elimination period in the Turing Division, we chose to form an alliance with FRC Team 3310 Black Hawk Robotics, FRC Team 6986 PPT Bots, and FRC Team 948 NRG (Newport Robotics Group).

Team 254 representative, Brandon Chuang, poses with our chosen alliance partners
Elimination Matches (Turing Division)
During our elimination matches, we focused all our efforts on winning our matches. Since ranking point didn’t matter, we focused on scoring more matchpoints. We put most of our efforts into scoring as many cargo balls as possible, because they were worth more than hatches. We wanted to score enough hatches such that we had multiple points to score at any moment to allow for us to change our scoring location and not get stopped by defense. We ran our cargo ship autonomous program to place hatch panels on the first two side slots of the cargo ship, and then filled the rocket and did any other tasks throughout the rest of the matches.

Backlash with alliance partner, Team 3310, at the end of a match
On the Einstein Field
We generally maintained a similar strategy during the Einstein matches as in theTuring Division elimination round, by placing a larger focus on the number of matchpoints we scored. However, we used the amount of cargo scored was used as a metric in case any matches ended in a tiebreaker. We made it to our final tiebreaker match on the Einstein field and, unfortunately, lost due to an amazing performance carried out by FRC Team 1323 MadTown Robotics, FRC Team 973 Greybots, and FRC Team 5026 Iron Panthers, the Newton Division winners, allowing us to earn the second place title.
A Special Thanks
At the 2019 FIRST World Championship in Houston, we would not have been able to be so successful without the amazing teams that we were able to work with during our matches. Also a special shout out to our pit crew and drive team for properly maintaining our robot during the tournament. We would also like to highlight the efforts of our alliance readiness crew to keep our alliance partners ready throughout the tournament. Team 254 would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, teachers, and parents who supported us and helped us succeed in this tournament.

Members of the Team 254 Pit Crew repair Backlash before an upcoming match

Our drive team poses for a picture on the Einstein Field

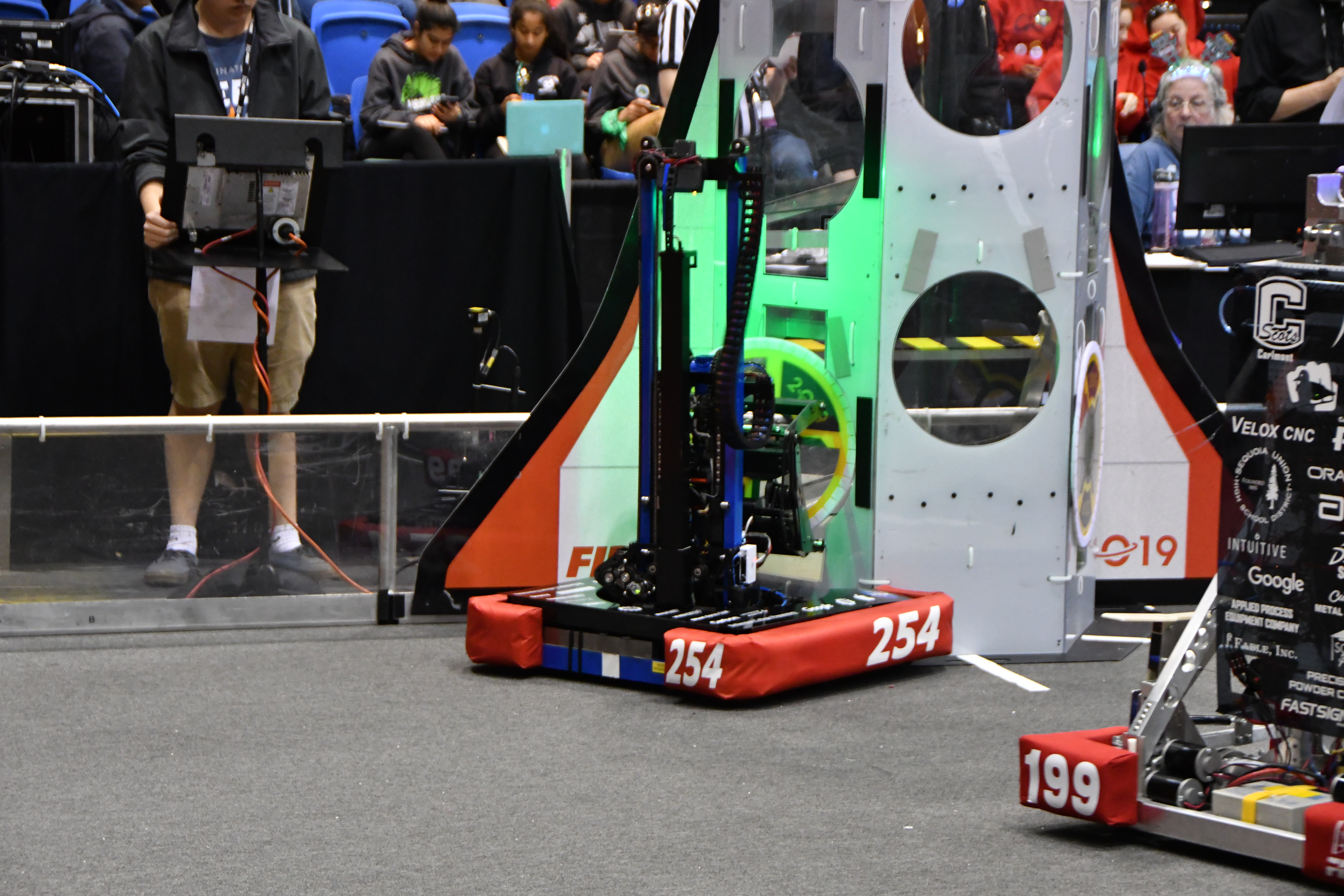
An action shot of Team 254’s suction climber at the end of a divisional qualifications match
2019 Silicon Valley Regional Champions!
A Brief Summary
As part of an eventful weekend, we attended the 2019 Silicon Valley Regional, in San Jose, CA. We had a great time at our second tournament of the FIRST Destination: Deep Space Season with our robot, Backlash. We won the Engineering in Excellence Award sponsored by Delphi. Alongside FRC Team 5499 The Bay Orangutans and FRC Team 6418 The Missfits, we were able to win the tournament, earning our 20th Blue Banner at the Silicon Valley Regional!
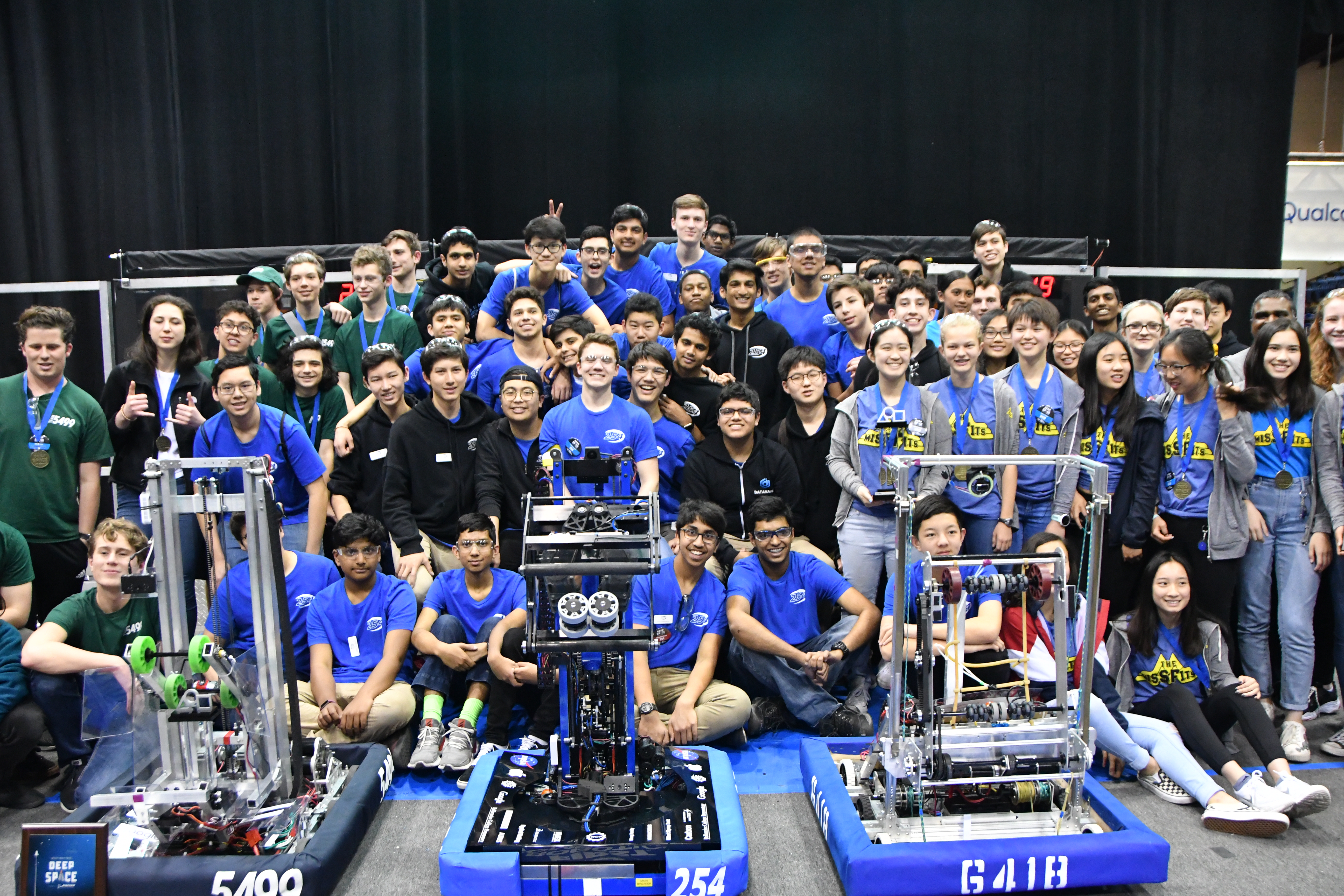
Team 254 and alliance partners Team 5499 and Team 6418 pose for a picture with Backlash after winning at the 2019 Silicon Valley Regional
Robot Performance
Qualification Matches
Throughout our qualification matches, we executed a strategy in which our goals were to fill one full rocket for a ranking point and to climb to level 3 of the HAB zone at the end of every match. We encountered consistent defense from most opposing alliances, resulting in our failure to fill in a rocket in a few matches. We also tried to maximize scoring cargo balls since it was the tiebreaker metric when it came to matches in which each alliance earned the same number of ranking points. We also maximized the amount of cargo balls scored during qualification matches since cargo balls are worth more in point value than hatch disks. At the tournament, we experimented with a new form of counter defense that involved our alliance partners blocking an opposing alliance’s robot to clear a path to the rocket for us to score. We ended up with a record of 9-0-0 during the qualification match period.
Team 254 places a hatch onto the rocket during the tele-operated period
Alliance Selection

Team 254 representative, Brandon Chuang, stands with Team 5499 and Team 6418 as they agree to join our alliance
Going into the elimination period, we were excited to join an alliance with FRC Team 5499 The Bay Orangutans and FRC Team 6418 The Missfits.
Elimination Matches
During the elimination period, we employed a very dynamic, new strategy that involved our robot and Team 5499’s robot to cross paths in order to draw and confuse defense from the opposing alliance. This strategy was employed to maximize our total cargo score. We knew that Team 5499 was great at scoring cargo, so we did our best to open spots for them to score by placing hatches on the lower two levels of the rocket and the front of the cargo ship. Once each of these areas had a hatch in place, we began scoring cargo. This strategy worked well against defense because the crossing of paths by our robot and Team 5499 confused the opposing alliance’s defense robot. Team 6418 did a great job focusing on playing heavy defense on the opposing alliance.

Team 254 and alliance partners Team 5499 and Team 6418 climb onto the HAB Zone at the end of an eliminations match
A Special Thanks
At the Silicon Valley Regional, we would not have been able to be so successful without the amazing teams that we were able to work with during our qualification and elimination matches. Also a special thanks for our pit crew and drive team for properly maintaining our robot during the tournament. A big thank you to the chairman’s presentation team for handling our team’s Chairman’s Presentation in front of a panel of FIRST Judges. Team 254 would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, teachers, and parents who helped us succeed in this regional.
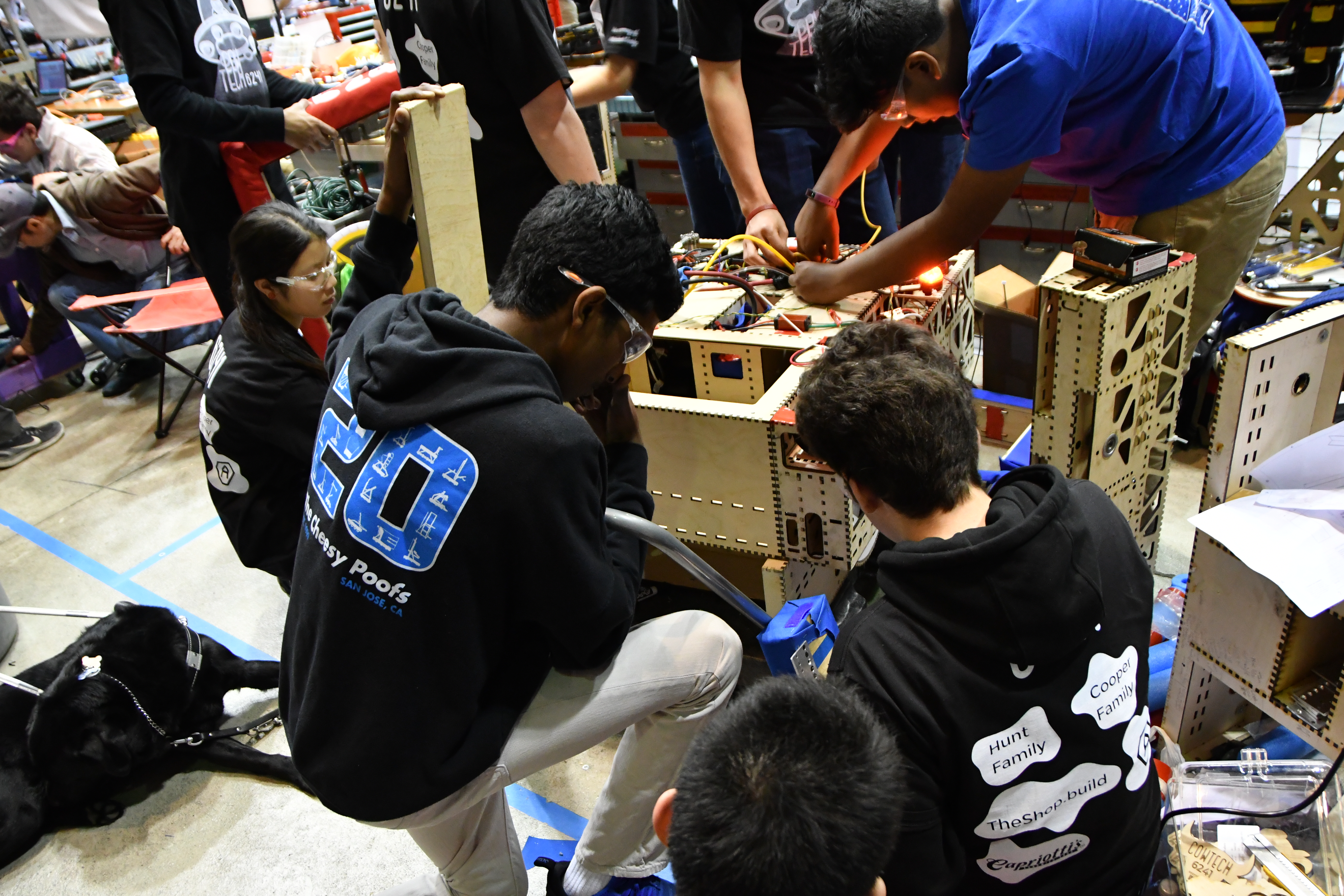
Our alliance readiness crew assists Team 6241 in before an upcoming qualifications match
Members of Team 254 are congratulated by judges after winning the Engineering in Excellence Award at the 2019 Silicon Valley Regional

Team 254 Driver, Jack Gnibus, celebrates the regional victory with mentor, Joey Diamond
2019 San Francisco Regional Champions!
A Brief Summary
As part of an eventful weekend, we attended the 2019 San Francisco Regional, in San Jose, CA. We had a great time at our first tournament of the FIRST Destination: Deep Space Season with our robot, Backlash. We won the Innovation In Control Award sponsored by Rockwell Automation for our code. Alongside FRC Team 971 Spartan Robotics and FRC Team 5700 SOTA Cyberdragons, we were able to win the tournament, earning another Blue Banner!

Team 254 poses for a picture with Backlash after winning at the 2019 San Francisco Regional
Robot Performance
Qualification Matches
Throughout our qualification matches, we executed a strategy in which our goals were to fill one full rocket for a ranking point and to climb to level 3 of the HAB zone at the end of every match. We encountered consistent defense from most opposing alliances, resulting in our failure to fill in a rocket in a few matches. We also tried to maximize scoring cargo balls since it was the tiebreaker metric when it came to matches in which each alliance earned the same number of ranking points. We also maximized the amount of cargo balls scored during qualification matches since cargo balls are worth more in point value than hatch disks. We ended up with a record of 10-1-1 during the qualification match period.

Team 254 places a cargo ball into the cargo ship during the tele-operated period
Alliance Selection

Team 254 representative, Brandon Chuang, stands with Team 5700 as we join Team 971 in an alliance
Going into the elimination period, we were excited to join an alliance with FRC Team 971 Spartan Robotics and FRC Team 5700 SOTA Cyberdragons.
Elimination Matches
Our main goal was to draw defense away from Team 971’s robot, allowing Team 971 to focus on scoring cargo balls. This strategy gave us the opportunity to score more points, since filling up the rocket did not give our alliance an advantage during the elimination period. Though we focused on distracting defense from the opposing alliance, we scored a few hatches for extra points. By scoring hatches on the rocket, we also opened up more options for Team 971 to score cargo balls. If we encountered particularly hard defense, we always had the option of scoring a hatch on level 1 of the rocket and getting around the defense later. This strategy allowed us to continuously have a lead during the match. In endgame, we climbed to either level 2 or level 3 of the HAB. Whenever we chose to execute a double climb, both our robot and Team 971’s robot climbed to level 3 of the HAB. During single climbs, Team 971 focused on level 3 of the HAB while we focused on climbing to level 2 of the HAB.

Team 254 and alliance partners Team 971 and Team 5700 load onto the HAB Zone before an upcoming eliminations match

Our alliance readiness crew assists Team 5700 in before an upcoming eliminations match
A Special Thanks
At the San Francisco Regional, we would not have been able to be so successful without the amazing teams that we were able to work with during our qualification and elimination matches. Also a special thanks for our pit crew and drive team for properly maintaining our robot during the tournament. A big thank you to the chairman’s presentation team for handling our team’s Chairman’s Presentation in front of a panel of FIRST Judges. Team 254 would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, teachers, and parents who helped us succeed in this regional.

Members of Team 254 cheer enthusiastically after winning a regional
Team 254 Business Development Director, Suraj Roy, discusses our business plan with a judge for the Entrepreneurship Award
Team 254 Presents: Backlash
Team 254 presents our 2019 entry into the FIRST Robotics Competition: Backlash. Backlash will be competing at the San Francisco Regional, followed by the Silicon Valley Regional and the FIRST Championship in Houston. More information on the robot.
