Blog - April 2014
2014 World Champions!
{“data”:[{“type”:”heading”,”data”:{“text”:”Overview”}},{“type”:”text”,”data”:{“text”:”Team 254 just returned from the 2014 FRC World Championship held in St. Louis. The team went undefeated in the qualification rounds of the Curie Division and paired with teams 469, 2848, and 74 for elimination matches. After a hard fight through the elimination rounds, the team was crowned the champions of the 2014 FRC season after winning the Einstein finals.\n”}},{“type”:”heading”,”data”:{“text”:”Great Food!”}},{“type”:”text”,”data”:{“text”:”The team had some awesome meals while in St. Louis. On Wednesday night the team had BBQ from Pappy’s Smokehouse, on Thursday 254 ate with Team 1114: Simbotics, and on Friday and Saturday the team enjoyed local St. Louis eateries. \n”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/88540781-image-294×300.jpeg”,”full”:”//media.team254.com/2014/04/88540781-image.jpeg”},”text”:”BBQ from Pappy’s Smokehouse was a team favorite”}},{“type”:”heading”,”data”:{“text”:”Great Fun!”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/8fd7079c-ej_pit-169×300.jpg”,”full”:”//media.team254.com/2014/04/8fd7079c-ej_pit.jpg”},”text”:”Team 1538: The Holy Cows pranked our pits on Friday morning with a ridiculous poster of Holy EJ.”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/97f807e6-ej_volunteers-225×300.jpg”,”full”:”//media.team254.com/2014/04/97f807e6-ej_volunteers.jpg”},”text”:”EJ also greeted all of FIRST Friday morning.”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/97f807e0-Qx1h7xS-400×225.jpg”,”full”:”//media.team254.com/2014/04/97f807e0-Qx1h7xS.jpg”},”text”:”On Friday morning Teams 254, 1538, and 16 played against Teams 111, 67, and 103 in a Hall of Fame match that the Weather Channel recorded to promote the FIRST Championship. Team 254’s alliance won with a score of 616 to 441 in this 4 minute long match.”}},{“type”:”heading”,”data”:{“text”:”Curie Qualification Matches\n”}},{“type”:”text”,”data”:{“text”:”On Thursday, Friday, and Saturday morning, 254 competed in the Curie division qualification matches \\(the other divisions being Archimedes, Galileo, and Newton\\) and held a match record of 10\\-0, seeding first among the 100 teams in the Curie division, 400 in the Championship, and about 3000 current FRC teams in the world.\n”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/8ff807b3-14041347241_f8c696ec80_o-400×266.jpg”,”full”:”//media.team254.com/2014/04/8ff807b3-14041347241_f8c696ec80_o.jpg”},”text”:”The drive team consisted of Operator Christopher Sides, Driver Christian Jimenez, Human Player Brandon Wui (not pictured), and Coach Travis Covington. “}},{“type”:”heading”,”data”:{“text”:”Alliance Selection\n”}},{“type”:”text”,”data”:{“text”:”After a night of intense strategy talks on Friday, 254 made its alliance selections on Saturday after the last qualification matches. For its first pick, 254 chose Team 469: Las Guerrillas from Michigan. The team was excited to get to work with such a strong, compatible, and versatile alliance partner, who could play hard defense and strong midfield during the tele\\-operated period. In addition, it successfully played the role of autonomous goalie, a rarity in the competition field. 254’s alliance strategy talks the previous night had operated on the goal of creating an alliance for winning Einstein, the \”Final Four\” competition among the division champions, as opposed to winning just the division. As a result, teams were ranked and chosen by virtue of their versatility, since the winning Einstein alliance generally proved the most unpredictable. 254’s second pick was Team 2848: The All\\-Sparks, from a fellow Jesuit school in Texas, for inbounding and defense on powerful opponent finishers. Finally, 254 chose its fourth and backup alliance member, Team 74: Team Chaos from Michigan, to be switched out with 2848 for defense and inbounding.\n”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/907e07be-14045108755_cc33b045e0_o-400×266.jpg”,”full”:”//media.team254.com/2014/04/907e07be-14045108755_cc33b045e0_o.jpg”},”text”:”254 and the rest of the number one alliance after the Curie division alliance selections”}},{“type”:”heading”,”data”:{“text”:”Curie Elimination Matches\n”}},{“type”:”text”,”data”:{“text”:”In the Curie division elimination matches, 254 faced stiff competition and was said to have had the most difficult elimination bracket. The alliance had a tough quarterfinal match against a surprisingly powerful offensive 8th alliance, comprised of Teams 624, 987, and 3476, who had already played a nearly unstoppable strategy together in Qualification Match 26, which saw a score of 320 \\- matching 254’s high score. 254’s alliance won the quarterfinals in two matches and faced an even tougher semifinal round against a defensive alliance of Teams 118 \\(another NASA House Team\\), 359, and 4334, and lost a very close and hotly contested first match. 254 eked out victory in the next two matches and advanced to division finals. 254 won in two matches and became division champions for the first time since its 2011 World Championship victory. The team also won its first ever Innovation in Control Award for its creation and open sourcing of Cheesy Vision, the hot goal detection system used during autonomous by an estimated 50% of teams at the Championship.\n”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/97a607e2-14065098983_07bb930042_o-400×266.jpg”,”full”:”//media.team254.com/2014/04/97a607e2-14065098983_07bb930042_o.jpg”},”text”:”254 used the 3 ball autonomous during Eliminations and had 469 use their goalie pole.”}},{“type”:”heading”,”data”:{“text”:”Einstein Eliminations and Finals\n”}},{“type”:”text”,”data”:{“text”:”Having won the Curie division, the alliance went on to the Einstein field. The scouting and strategy team particularly feared the Newton division champions Team 1114: Simbotics \\(254’s rival in blue banners, friends from the Waterloo regional, 2008 World Champions, and the 2012 Championship Chairman’s winner\\), Team 1678: The Citrus Circuits \\(the finalist team from 254’s home event, the Silicon Valley Regional and with back to back Einstein appearances\\), Team 1640: Sab\\-BOT\\-age \\(division champions from previous years\\), and Team 5136: The Mechapirates \\(one of our favorite rookie teams from the Central Valley Regional\\).\n\n254 first faced the Archimedes Champions 1477, 2590, and 1625 in the Einstein semifinals and won in two exciting matches, scoring 320\\-235 and 261\\-245. The Curie alliance went on to face the formidable Newton alliance in the finals. Undaunted by the supposed \”Curie Curse,\” the fact that the Curie Division winners have never won the World Championships, the Curie alliance won its first match 361\\-236, celebrating madly as 254’s 3\\-ball hot goal autonomous scoring bypassed 1114’s attempts to block it by driving a rarely seen autonomous path that drove 254 out to the wall to shoot over the low goal to prevent goalie interference. In the second autonomous match, 1114 pushed Barrage, and 254 hit only one of three autonomous balls. The match was lost from the outset and was scored 240\\-153 for the Newton alliance. The crowd immediately attributed this sudden unlucky loss to the Curie curse, and the various song\\-and\\-dance numbers thrown in by FIRST did little to raise the spirits of the shocked supporters of the Curie Champions. In an intense third and final match, 254’s autonomous was successful thanks to 469’s foregoing the use of its goalie pole and instead blocking 1114’s movement. Some observers compared the Einstein finals autonomous battle to that of two chess grandmasters. In teleoperated mode, the two alliances went back and forth, but the Curie alliance’s incredible defense on the opposing finisher 1114 picked up momentum and resulted in a close 280\\-250 victory when 254 scored a last\\-second shot under heavy defense. The crowd exploded in cheers as 254 became World Champions for the second time in four years and simultaneously broke the Curie curse. Cheers included \”Curse goes Poof\” and the ever\\-popular \”Yeah buddy!\”\n”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/8874077c-14021429666_b73fb091e9_o-400×266.jpg”,”full”:”//media.team254.com/2014/04/8874077c-14021429666_b73fb091e9_o.jpg”},”text”:”254 used the infamous 3 ball autonomous even against 1114’s goalie pole”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/984307f0-14041809891_325a5f4c2f_o-400×266.jpg”,”full”:”//media.team254.com/2014/04/984307f0-14041809891_325a5f4c2f_o.jpg”},”text”:”The Team’s excitement after the final match”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/981d07eb-14041843352_7bb1826c2a_o-200×300.jpg”,”full”:”//media.team254.com/2014/04/981d07eb-14041843352_7bb1826c2a_o.jpg”},”text”:”EJ’s roar after winning was heard throughout the stadium”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/902f07b2-IMG_20140426_190225-400×300.jpg”,”full”:”//media.team254.com/2014/04/902f07b2-IMG_20140426_190225.jpg”},”text”:”Travis’ selfie with the team”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/98d807f0-10001099_655852797819277_7487597249566466903_o-400×266.jpg”,”full”:”//media.team254.com/2014/04/98d807f0-10001099_655852797819277_7487597249566466903_o.jpg”},”text”:”The Team on the field after the awards ceremony”}},{“type”:”heading”,”data”:{“text”:”Thank you!”}},{“type”:”text”,”data”:{“text”:”Team 254 would like to congratulate its alliance partners 469, 2848, and 74 for their invaluable contributions to the Championship victory and Teams 1114, 1678, and 1640 for the most intense matches that 254 had ever played. 254 also welcomes Team 27: RUSH into the Hall of Fame.\n”}}]}
Pre-STL Day 4: Lighting Up
by Nathan Duong ’16
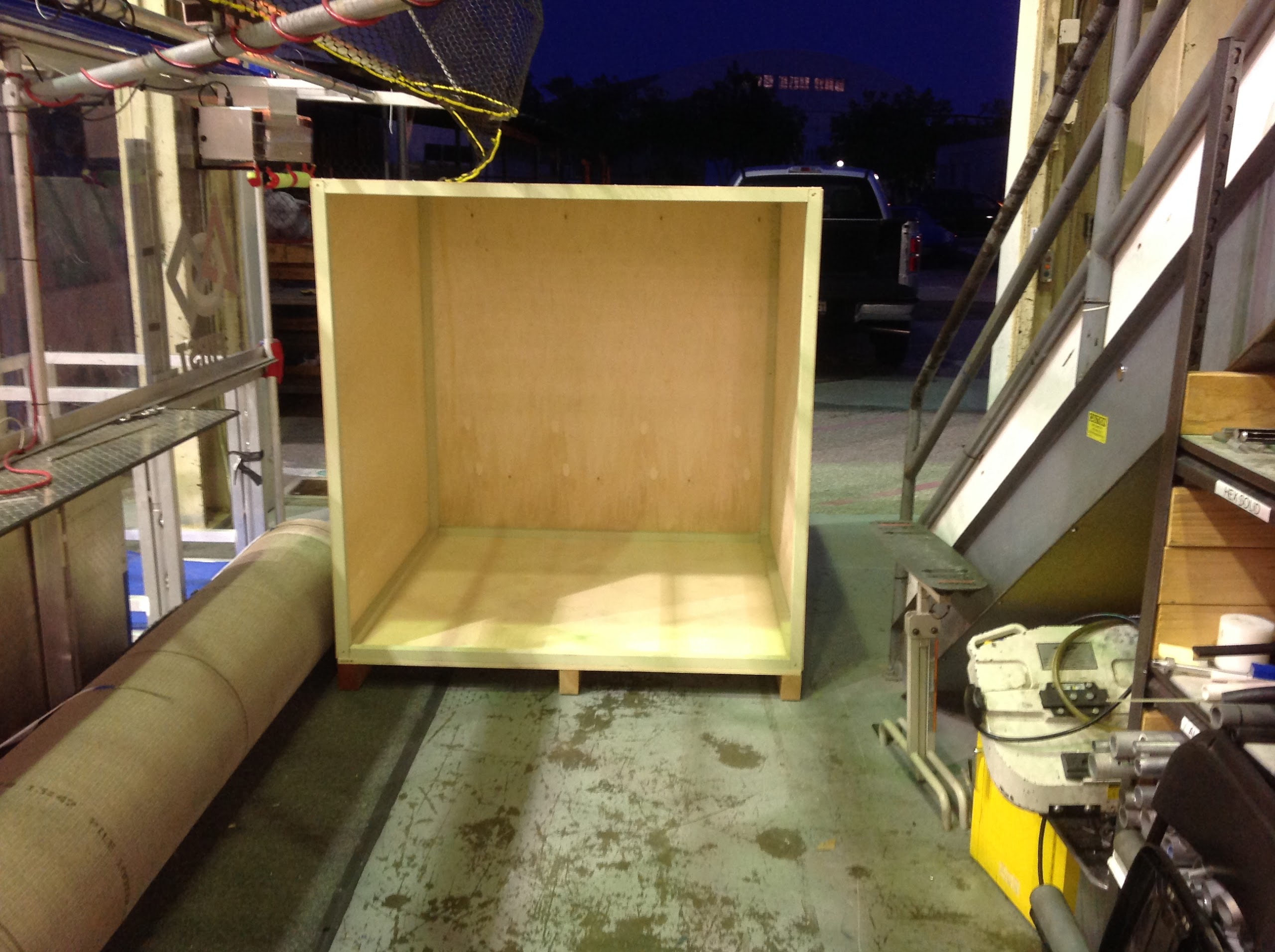
Competition Preparation: Transportation Crate
The second layer of paint has been applied to the transportation crate and is now finished!

Field Construction: 1 Point Goals
Members of the team have continued to construct the two wooden 1\-point goals to mirror the left side of the field.

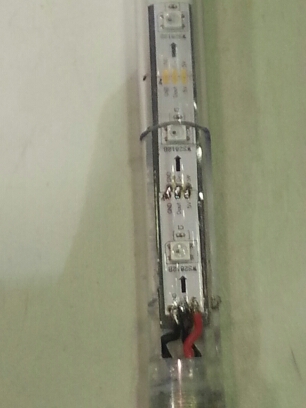
Pit Lights
The pit lights are being restored by soldering the wires after previously being burnt out. In addition, the HTML and CSS for the lights added “knightrider,” “rainbow,” and custom color effects.
Bumper Fabric
The new, extra layer of fabric is being applied to the bumper of the robot, therefore removing the drawback of being “T-boned.”
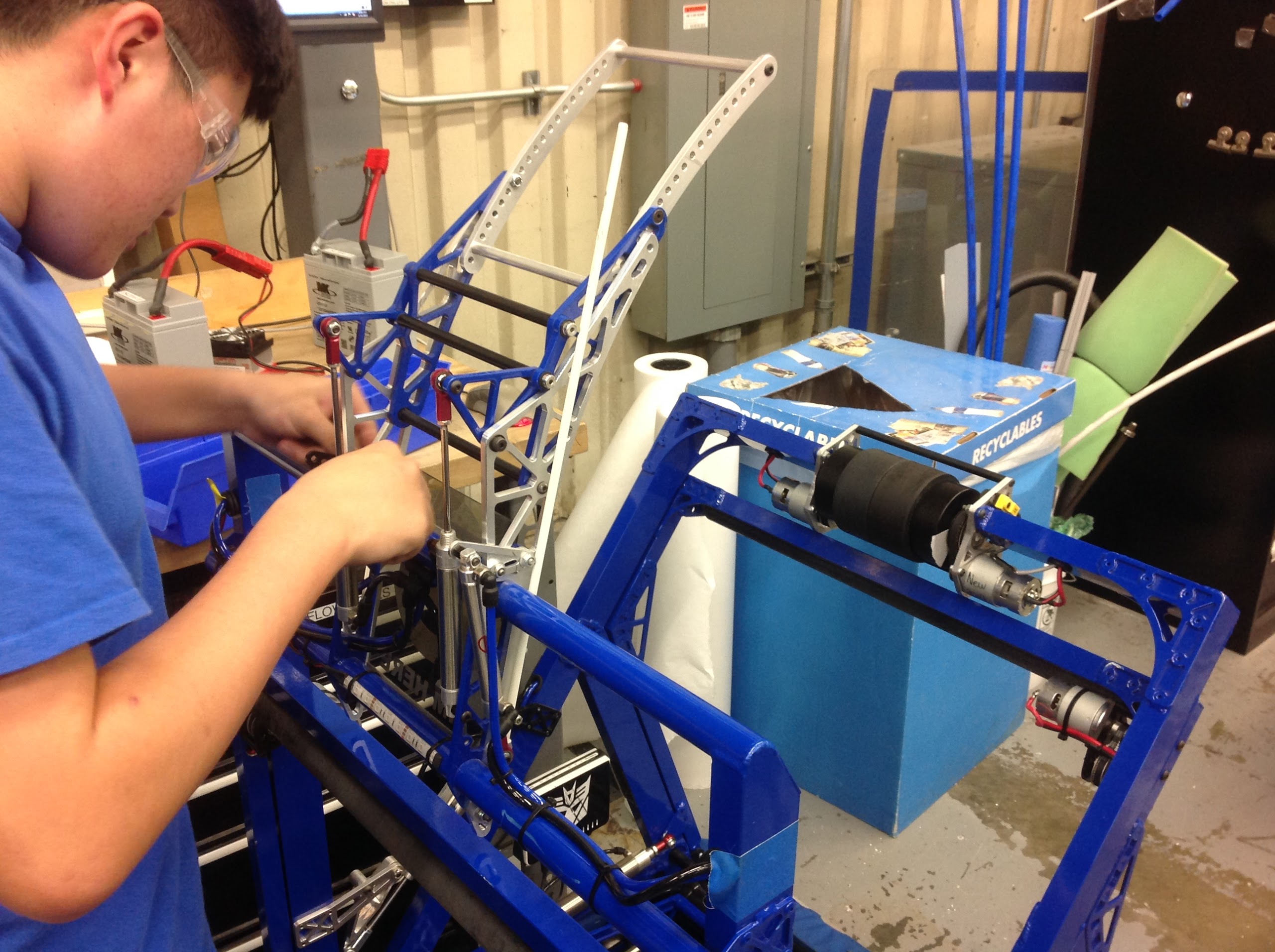
Wheel Hubs
The team continued to work on and improve the CAD of the future wheel hubs that will also expel drawback time from “T-boning” by increasing the width of the center wheel.

Web App
The web app is being worked on and members of the team sought to include FRC/VEX hours, the directory, and blog. Also, the logo for the app is being designed. Ideally this app will be available on iOS with open access to the students on their iPads and mobile devices.
Action Items
- Bumper fabric testing
- Rebuild bumper frames for competition
- 1-Point Goals
- See board
Pre-STL Day 3: Boxes and Boxing In
by Nathan Duong ’16
Transportation
The 5’ x 5’ x 5’ wooden crate that will be used for tool transportation in the St. Louis trip is being worked on. The first of two coats of blue paint was applied to patch the blank patches in a lighter color.


Scrimmaging
Scrimmaging is continually being conducted in preparation for worlds.

Reducing Cycle Time
Testing Bumper Material
In addition, new bumper fabric is being added to lower the coefficient of friction and time “T-boned.”

Wheel Hubs
The team cut six solid metal 2’ x 4’s for wider wheel hubs. This will create more traction on Barrage’s wheels to lessen time “T-boned.”

Field Construction: 1 Point Goals
The team has been brainstorming to create two more wooden 1-point goals based on the measurements from the CAD. These are being constructed in order to have balanced coverage of goals on the left-most side of the field.
Action Items
Pre-STL Day 2: Robot Repairs
by: Brenden Farrer
Today at the lab, other FIRST teams, such as Spartan Robotics, came to practice with our field. The primary focus was on fixing the practice robot and Skystalker to continue driver practice with the other teams.
Skystalker
A “hat” was built for Skystalker that allows it to block and carry a ball. The wheels were retreaded, as the previous ones have worn down. Hopefully these new defense capabilities will provide more practice for the drive team.

Practice Robot
Today students began discussion and planning of future projects. However, a second ball settler was attached to reduce the motion of inbounded or caught balls to increase accuracy when shooting. Adding a powerslide wheel was discussed, no changes were implemented today.
Prep for World’s
For the trip to St. Louis, all of the tools will be shipped in a 5’ x 5’ x 5’ wooden crate. Using the measurements from the CAD designed yesterday, the wood pieces were cut and assembled.

Action Items
- See board
Pre-STL Day 1: Going Forward
by Dan Ngo ’17
Tasks
Today, the team started with a discussion about our performance in SVR, between all of the mentors and members at the lab. During that, the team addressed most of the issues that the robot had during the tournament, which mainly consisted of getting stuck by T-boning from an opponent, which would cause too much friction escape, as well as improving and testing new autonomous, to cover new possibilities and better reliability. The other issues include general fixing, testing, and making of parts and possible ways to improve our alliances.
Programming
During the present team meeting, concerns were raised about possible robots blocking the goal autonomous, so it was decided that another autonomous would be made to suit this situation, shooting immediately instead of waiting for a hot goal. Before we could do this, however, Skystalker had to be fixed, with the router unable to connect to our computers.
Maintenance
Thus, Skystalker had to be fixed up and made taller to test the new autonomous that accounted for goal blocking. For practice, the practice Barrage was also updated and fixed, to catch it up with the competition Barrage at SVR. Then autonomous testing began.

The team additionally had to unpack and reorganize all the parts brought back from SVR, as well as general reorganization of the shelves.
With a large amount of untested batteries, the team also decided to test all of them in preparation for Worlds. This was done by hooking the batteries up to a computer, drawing current, and and calculating the condition of the battery once the current drops in value. Additionally, leads were added to new batteries.

Public Relations
Returning from SVR, the team flyer had to be updated to be current with the SVR version of Barrage. The technical binder also had discrepancies and errors to be fixed.
Action Items
- Continue autonomous testing
- Continue upgrading Skystalker
- Continue testing batteries
- Build new bumpers
- See picture and/or whiteboard
2014 Silicon Valley Regional
Team 254 rounded out its regional play this past weekend with its annual attendance at the Silicon Valley Regional FIRST Robotics Competition.
The team won 10 of its 11 matches in the qualification round, losing match 47 against the top-seeded team, 971, who had gone and continues to go undefeated in all of regional matches this year. At the end of qualifications 254 was seeded 3rd behind 971 Spartan Robotics and 1678 Citrus Circuits, with the highest accumulated score in Teleoperated Mode. 971 chose 254 as its first alliance partner and the two teams chose 1662, Raptor Force Engineering, as the third.
This alliance went undefeated in eliminations, setting the tournament high score of 325 in its second quarterfinal match and winning its quarterfinal matches by margins of 100 to 200 points. It semifinal and final rounds were closer and more exciting, narrowly edging out the finalists 1678, 368 Kika Mana, and 4171 Bay Bots by 40 points.
In the awards ceremony, 254 won the Gracious Professionalism Award for its extensive support of other teams in the tournament and model behavior, exemplifying the ideals of FIRST competition. Specifically, 254 sent Robot FIRST Aid teams around the pit area to discuss strategy with its alliance partners and provide assistance to teams who needed it.
This Silicon Valley Regional victory marks 254’s 15th in the 16 years of its and the regional’s existence. Congratulations to alliance partners 971 and 1662, finalists 1678, 368, and 4171, and Regional Chairman’s Winner 604, Leland Robotics.
254 is now ranked #1 in the world on FRC Top 25 for its three regional victories.
Pre-SVR Day 8
by Brendan Farrer ’17
This lab day was mainly dedicated to preparing for the SVR tournament and finishing up the Chairman’s binder and Technical binder.
Pit Display
The final touches were made to the pit display, including fixing the remote light controls and adding a carousel effect for when it is inactive. While programmers edited the code, other members finished the content for the display, such as re-writing the technical page.

Machining
To assist in collaborative gameplay, a polycarb backing was created to mount on the hood. This allows the human players from other teams to inbound more accurately.

Practicing
To continue driver and human player practice, the pinniped pistons were added back to the robot and the modifications were finished to the catching system. These modifications allow the robot to catch balls thrown by a human player without opening the intake. Several team members were also trained to be human partners for the robot.

Writing
Several team members contributed to the completion of the Tech Binder along with the Chairman’s Award Binder. Although the majority of the work was completed, they continue to format and edit the content.

SVR Packing
With only two days until SVR, the necessary tools and materials for the competition were prepared to be packaged for travel. Mentors and students went through travel crates, re-labeling and organizing for the optimal set up.

Robotics Engineering Day 2014
By: Chanan Walia
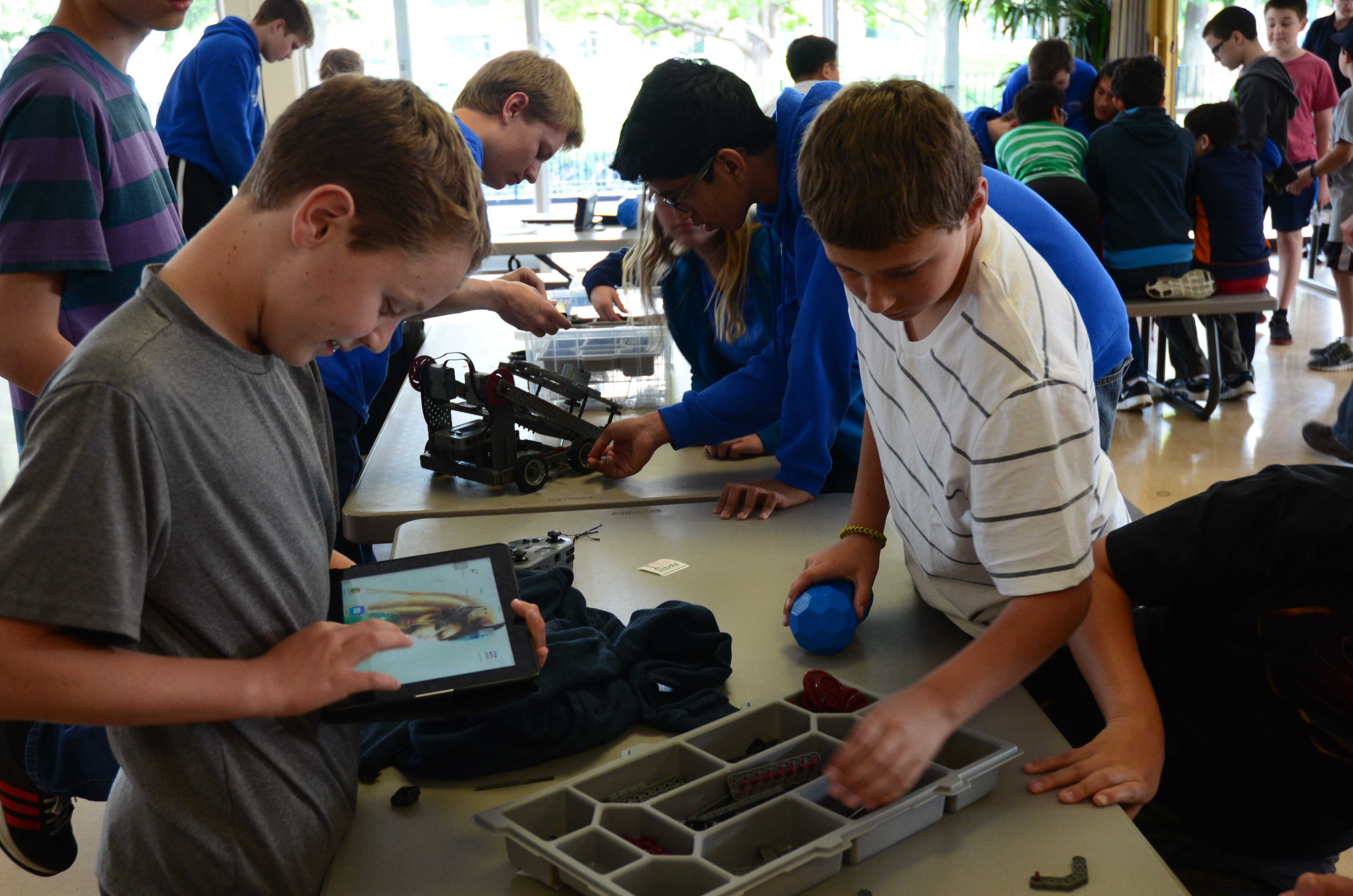
On March 30, 2014, Team 254 hosted their first robotics engineering day. Nearly sixty middle school teams signed up to attend.
To kick off the day, Godwin Vincent presented an introduction to robotics and how the engineering process is universal throughout every type of engineering. Chris Correa and Andrew Torrance discussed VEX and FRC and its relationship to engineering.
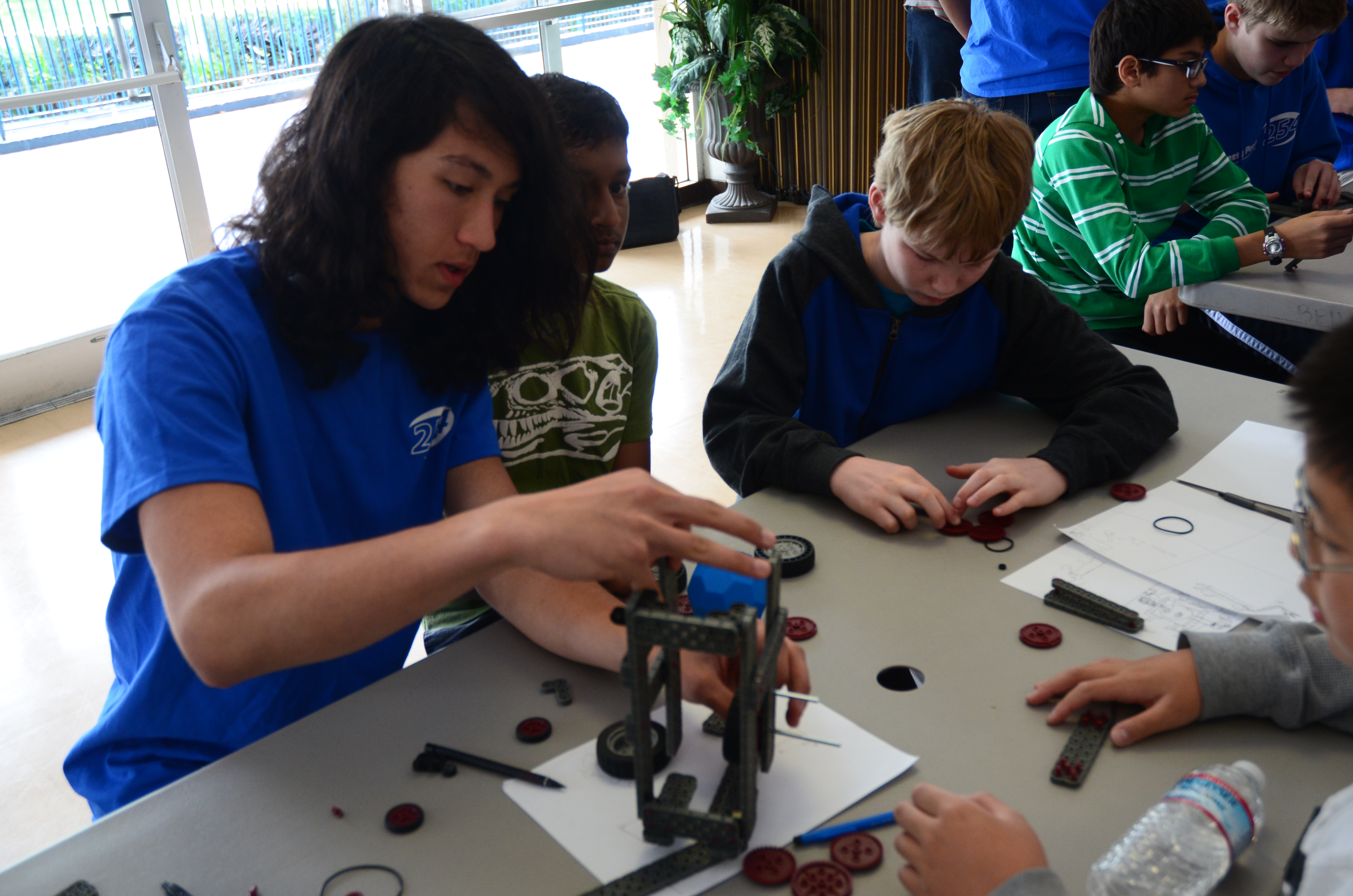
After the introduction, teams split up into groups, and a couple 254 members led each group. After meeting with their leaders and brainstorming their robot design, the students took a short break.
Team 254 then began to demonstrate Overkill, the 2013 robot for “Ultimate Ascent.” The middle school students caught the Frisbees, and some were lucky enough to catch 254 T-shirts thrown by “Shockwave,” the T-Shirt launching robot. Elias Wu demonstrated 254A/F’s VEX Robot, made for the 2013-2014 Toss-Up challenge.
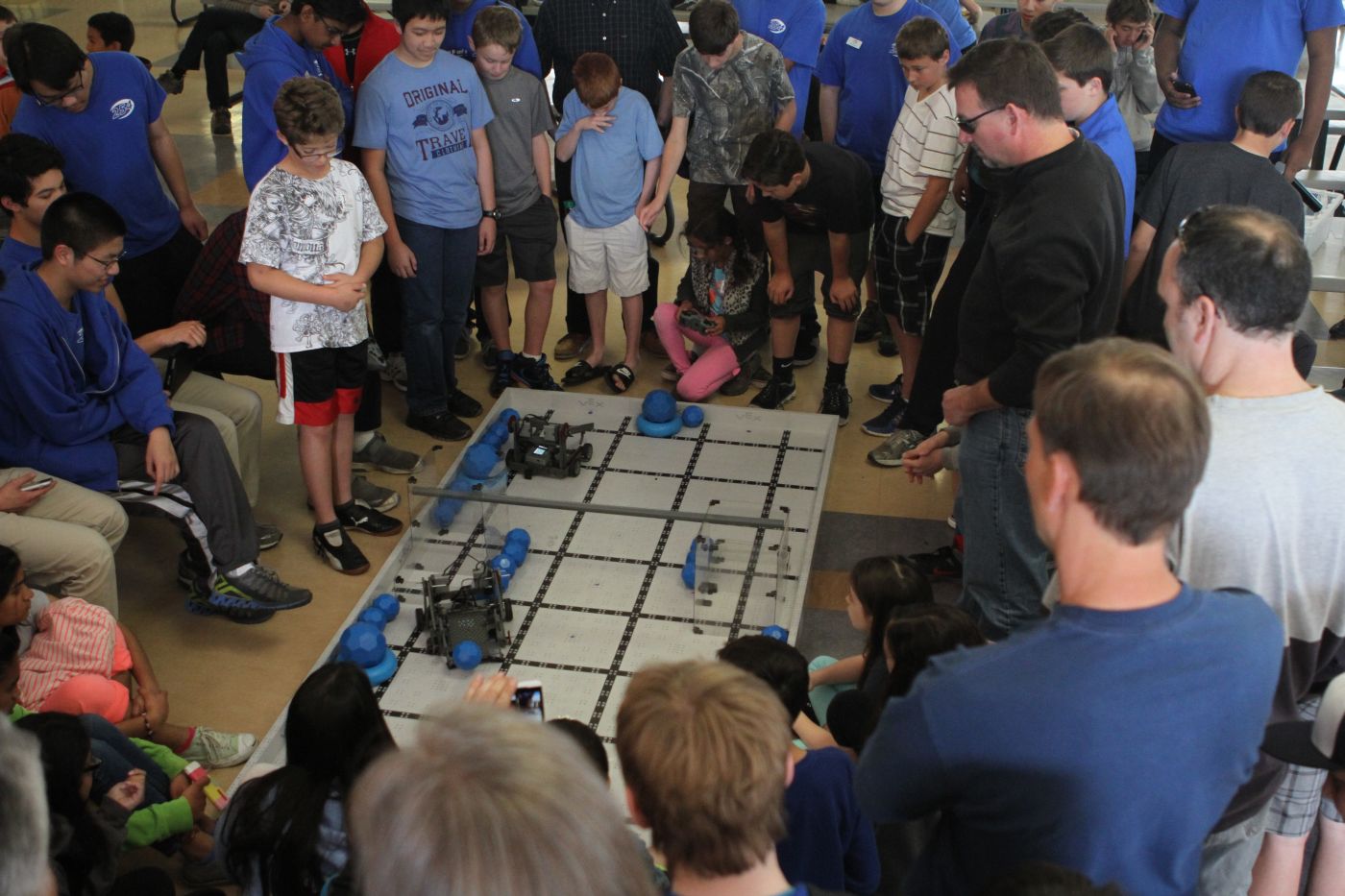
Students then returned to groups to finish brainstorming their VEX IQ robot designs and start building their robots. They spent two hours building their robots, and after a brief programming demonstration, they were able to complete their IQ robots.
Finally, after their robots neared completion, students tested their robots on the fields and competed against each other. At the end of the day, parents were welcome to view their children’s creations. Overall, this was an awesome event and one we hope to host again in the future. Thank you to all the participants and volunteers!