
Blog Archive
Dropshot Reveal
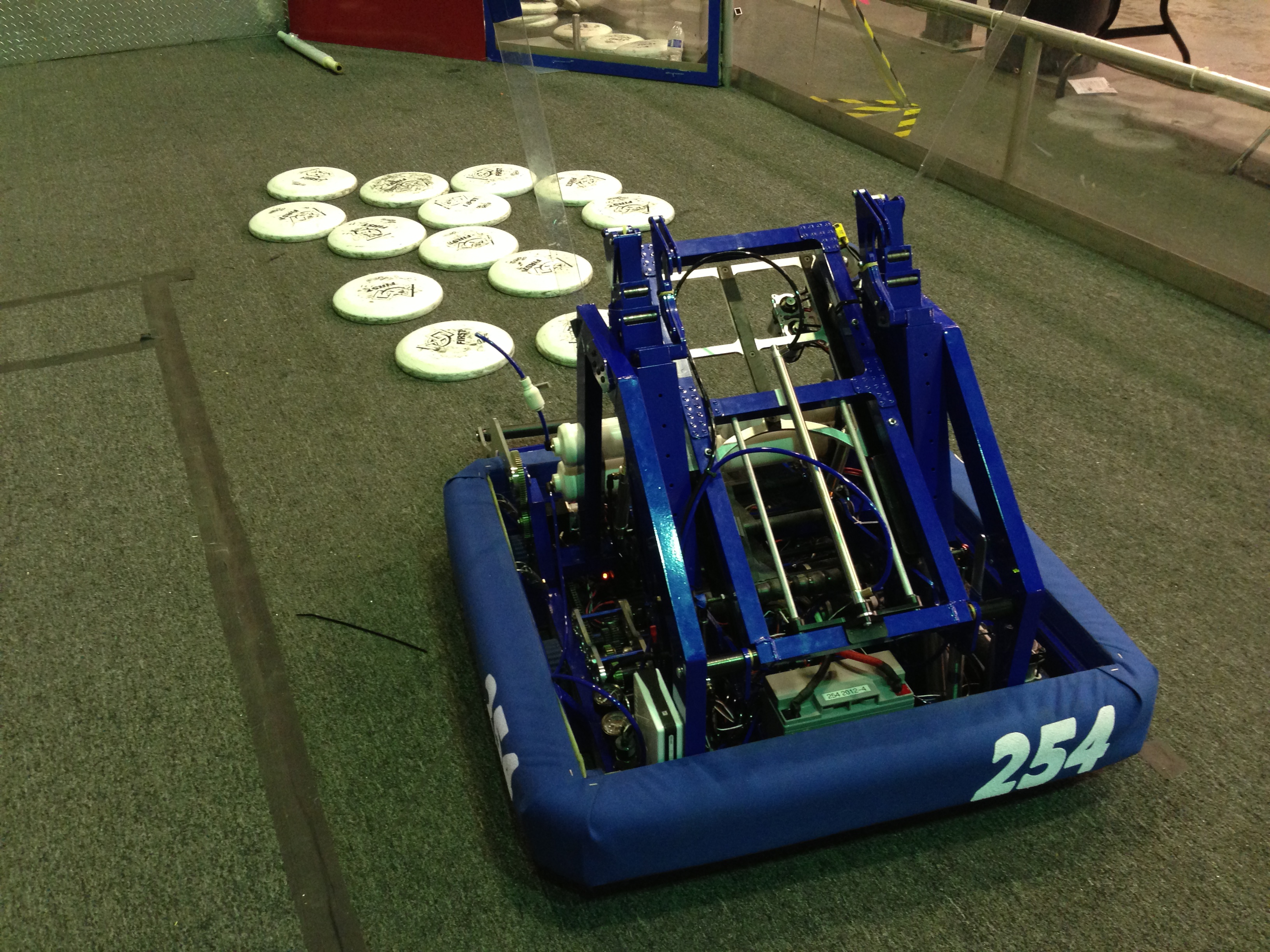
Team 254 proudly presents our 2016 entry into the FIRST Robotics Competition: Dropshot. Dropshot will be competing at the Central Valley Regional this weekend, followed by the Silicon Valley Regional and the last single FIRST Championship. More information on the robot.

Bellarmine VEX Tournament
The 7th Annual Bellarmine VEX Tournament, hosted by Team 254, will be held November 21-22, 2014 project management web app. The event is free for spectators. The best time to watch is from the alliance selection process (3pm Saturday), through the finals, which will finish by 6:30pm.
Information
- Changes from Last Year
- Schedule
- Tournament Location & Parking
- Northern California VRC Championship Qualifications
- Concessions
- Information for Competitors
- Information for Novices
Changes from Last Year
- There are more teams competing, so if you can, please get inspected on Friday evening (6 – 8pm). We’ll officially open the pits at 7am and start inspections at 7:15am on Saturday.
- We will have a photo booth setup with a backdrop for professional looking photos of your robot and/or team. This will be located next to the skills challenge field on the 2nd floor of the Sobrato building.
- We will have a competition Instagram: Use #BELLVEX in Instagram during the tournament and see your picture appear on displays in the Pits and in Sobrato.
Schedule
| Friday, November 21, 2014 | |
|---|---|
| 6 pm – 8 pm | Check-In and Inspection (in Liccardo) |
| 7 pm – 9 pm | Practice time for teams |
| Saturday, November 22, 2014 | |
| 7:00 am | Pit Area and Registration Opens (in Liccardo) |
| 8:00 am | Check-in Deadline for teams (at Pit Admin in Liccardo) |
| 7:15 am – 8:30 am | Inspection (in Liccardo) |
| 7:30 am – 8:30 am | Practice Rounds (in Sobrato Theater) |
| 8:30 am – 8:45 am | Driver’s Meeting (in Sobrato Theater) |
| 8:30 am – 9:30 am | Sign up for judging interview (at Pit Admin table) |
| 8:45 am | Welcome (in Sobrato Theater) |
| 9:00 am – 12:30pm | Qualifying Rounds (in Sobrato Theater) |
| 12:30 pm – 1:00 pm | Lunch Break (We will have Pizza Order Forms) |
| 1:00 pm – 2:35 pm | Qualifying Rounds Continue (in Sobrato Theater) |
| 2:45 pm | Alliance Selection Process (in Sobrato Theater) |
| 3:00 pm – 5:30 pm | Elimination Rounds (in Sobrato Theater) |
| ~5:30 pm – 6:30 pm | Finals, Awards, Closing Ceremony (in Sobrato Theater) |
Tournament Location & Parking
Bellarmine College Preparatory 960 W. Hedding St. San Jose, CA 95126
Campus Map
For the competition, the pits are in Liccardo cafeteria and the competition fields in Sobrato theater. These are #6 and #7 on the campus map at: //www.bcp.org/about-us/our-campus/index.aspx.
Street parking is very limited due to permit parking restrictions. There is additional parking by Emory and Stockton streets. Check in with the Pit Admin when you arrive, who will provide you with a map of the tournament facilities.
Northern California VRC Championship Qualifications
We are qualifying 8 teams for the Northern California VRC State Championship:
- 3 Team Winning Alliance
- 3 Team Finalists
- 1 Design Award winner
- 1 Excellence Award winner
Awards Given
- Excellence Award
- Design Award
- Judges Award
- Sportsmanship Award
Concessions
We will offer pizza for preorder. Info will be sent in a different email. We will have a few pasta dinners available for Friday night and will be offering snacks and drinks on Saturday.
Information For Competitors
- If you cannot arrive before close of check-in at 8am, please call or text (preferred): 408-377-5330 or email: [email protected].
- If you want to be considered for the Excellence or Design awards, you will need to sign up for an interview by 9:30am. Go to the Pit Admin to schedule (or change your appointment time if needed). The interview rooms are on the second floor of the Sobrato Theater building near the swimming pool.
- The skills challenge field is also on the 2nd floor of the Sobrato theater building. Teams are not limited to the number of attempts, however, any team with fewer than 3 attempts can move ahead of other teams waiting in line.
- Bring your signed VEX competition waiver, available at: //www.roboticseducation.org/documents/2013/06/vrc-participant-release-form.pdf.
- Check the match schedule when it is published and make sure you are ready for each match. We try hard to keep matches running on time.
- Be sure your robot is ready for inspection. Double check the requirements here: //www.roboticseducation.org/documents/2013/06/inspection-checklist-vrc.pdf.
- Have fully charged batteries for each match.
- Be sure the drivers and coach have safety glasses when they arrive at the field to compete.
- Bring a power strip. We should have an outlet within 6′ of your table for you to plug into.
- WiFi will be available in the pits
- A Help Desk will be available with a limited supply of parts should anything break or you are unable to pass inspection
Information For Novices
It is highly recommended for you to arrive Friday to go through the inspection and try a couple practice matches. Friday will be much more relaxed and our inspectors will be able to help you through the inspection process. Also, our field managers will be able to guide you through the competition process. Be sure to bring fully charged batteries, chargers, spare parts and tools in case anything breaks. Ensure your VEXnet keys are working well.

2014 World Champions!
{“data”:[{“type”:”heading”,”data”:{“text”:”Overview”}},{“type”:”text”,”data”:{“text”:”Team 254 just returned from the 2014 FRC World Championship held in St. Louis. The team went undefeated in the qualification rounds of the Curie Division and paired with teams 469, 2848, and 74 for elimination matches. After a hard fight through the elimination rounds, the team was crowned the champions of the 2014 FRC season after winning the Einstein finals.\n”}},{“type”:”heading”,”data”:{“text”:”Great Food!”}},{“type”:”text”,”data”:{“text”:”The team had some awesome meals while in St. Louis. On Wednesday night the team had BBQ from Pappy’s Smokehouse, on Thursday 254 ate with Team 1114: Simbotics, and on Friday and Saturday the team enjoyed local St. Louis eateries. \n”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/88540781-image-294×300.jpeg”,”full”:”//media.team254.com/2014/04/88540781-image.jpeg”},”text”:”BBQ from Pappy’s Smokehouse was a team favorite”}},{“type”:”heading”,”data”:{“text”:”Great Fun!”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/8fd7079c-ej_pit-169×300.jpg”,”full”:”//media.team254.com/2014/04/8fd7079c-ej_pit.jpg”},”text”:”Team 1538: The Holy Cows pranked our pits on Friday morning with a ridiculous poster of Holy EJ.”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/97f807e6-ej_volunteers-225×300.jpg”,”full”:”//media.team254.com/2014/04/97f807e6-ej_volunteers.jpg”},”text”:”EJ also greeted all of FIRST Friday morning.”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/97f807e0-Qx1h7xS-400×225.jpg”,”full”:”//media.team254.com/2014/04/97f807e0-Qx1h7xS.jpg”},”text”:”On Friday morning Teams 254, 1538, and 16 played against Teams 111, 67, and 103 in a Hall of Fame match that the Weather Channel recorded to promote the FIRST Championship. Team 254’s alliance won with a score of 616 to 441 in this 4 minute long match.”}},{“type”:”heading”,”data”:{“text”:”Curie Qualification Matches\n”}},{“type”:”text”,”data”:{“text”:”On Thursday, Friday, and Saturday morning, 254 competed in the Curie division qualification matches \\(the other divisions being Archimedes, Galileo, and Newton\\) and held a match record of 10\\-0, seeding first among the 100 teams in the Curie division, 400 in the Championship, and about 3000 current FRC teams in the world.\n”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/8ff807b3-14041347241_f8c696ec80_o-400×266.jpg”,”full”:”//media.team254.com/2014/04/8ff807b3-14041347241_f8c696ec80_o.jpg”},”text”:”The drive team consisted of Operator Christopher Sides, Driver Christian Jimenez, Human Player Brandon Wui (not pictured), and Coach Travis Covington. “}},{“type”:”heading”,”data”:{“text”:”Alliance Selection\n”}},{“type”:”text”,”data”:{“text”:”After a night of intense strategy talks on Friday, 254 made its alliance selections on Saturday after the last qualification matches. For its first pick, 254 chose Team 469: Las Guerrillas from Michigan. The team was excited to get to work with such a strong, compatible, and versatile alliance partner, who could play hard defense and strong midfield during the tele\\-operated period. In addition, it successfully played the role of autonomous goalie, a rarity in the competition field. 254’s alliance strategy talks the previous night had operated on the goal of creating an alliance for winning Einstein, the \”Final Four\” competition among the division champions, as opposed to winning just the division. As a result, teams were ranked and chosen by virtue of their versatility, since the winning Einstein alliance generally proved the most unpredictable. 254’s second pick was Team 2848: The All\\-Sparks, from a fellow Jesuit school in Texas, for inbounding and defense on powerful opponent finishers. Finally, 254 chose its fourth and backup alliance member, Team 74: Team Chaos from Michigan, to be switched out with 2848 for defense and inbounding.\n”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/907e07be-14045108755_cc33b045e0_o-400×266.jpg”,”full”:”//media.team254.com/2014/04/907e07be-14045108755_cc33b045e0_o.jpg”},”text”:”254 and the rest of the number one alliance after the Curie division alliance selections”}},{“type”:”heading”,”data”:{“text”:”Curie Elimination Matches\n”}},{“type”:”text”,”data”:{“text”:”In the Curie division elimination matches, 254 faced stiff competition and was said to have had the most difficult elimination bracket. The alliance had a tough quarterfinal match against a surprisingly powerful offensive 8th alliance, comprised of Teams 624, 987, and 3476, who had already played a nearly unstoppable strategy together in Qualification Match 26, which saw a score of 320 \\- matching 254’s high score. 254’s alliance won the quarterfinals in two matches and faced an even tougher semifinal round against a defensive alliance of Teams 118 \\(another NASA House Team\\), 359, and 4334, and lost a very close and hotly contested first match. 254 eked out victory in the next two matches and advanced to division finals. 254 won in two matches and became division champions for the first time since its 2011 World Championship victory. The team also won its first ever Innovation in Control Award for its creation and open sourcing of Cheesy Vision, the hot goal detection system used during autonomous by an estimated 50% of teams at the Championship.\n”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/97a607e2-14065098983_07bb930042_o-400×266.jpg”,”full”:”//media.team254.com/2014/04/97a607e2-14065098983_07bb930042_o.jpg”},”text”:”254 used the 3 ball autonomous during Eliminations and had 469 use their goalie pole.”}},{“type”:”heading”,”data”:{“text”:”Einstein Eliminations and Finals\n”}},{“type”:”text”,”data”:{“text”:”Having won the Curie division, the alliance went on to the Einstein field. The scouting and strategy team particularly feared the Newton division champions Team 1114: Simbotics \\(254’s rival in blue banners, friends from the Waterloo regional, 2008 World Champions, and the 2012 Championship Chairman’s winner\\), Team 1678: The Citrus Circuits \\(the finalist team from 254’s home event, the Silicon Valley Regional and with back to back Einstein appearances\\), Team 1640: Sab\\-BOT\\-age \\(division champions from previous years\\), and Team 5136: The Mechapirates \\(one of our favorite rookie teams from the Central Valley Regional\\).\n\n254 first faced the Archimedes Champions 1477, 2590, and 1625 in the Einstein semifinals and won in two exciting matches, scoring 320\\-235 and 261\\-245. The Curie alliance went on to face the formidable Newton alliance in the finals. Undaunted by the supposed \”Curie Curse,\” the fact that the Curie Division winners have never won the World Championships, the Curie alliance won its first match 361\\-236, celebrating madly as 254’s 3\\-ball hot goal autonomous scoring bypassed 1114’s attempts to block it by driving a rarely seen autonomous path that drove 254 out to the wall to shoot over the low goal to prevent goalie interference. In the second autonomous match, 1114 pushed Barrage, and 254 hit only one of three autonomous balls. The match was lost from the outset and was scored 240\\-153 for the Newton alliance. The crowd immediately attributed this sudden unlucky loss to the Curie curse, and the various song\\-and\\-dance numbers thrown in by FIRST did little to raise the spirits of the shocked supporters of the Curie Champions. In an intense third and final match, 254’s autonomous was successful thanks to 469’s foregoing the use of its goalie pole and instead blocking 1114’s movement. Some observers compared the Einstein finals autonomous battle to that of two chess grandmasters. In teleoperated mode, the two alliances went back and forth, but the Curie alliance’s incredible defense on the opposing finisher 1114 picked up momentum and resulted in a close 280\\-250 victory when 254 scored a last\\-second shot under heavy defense. The crowd exploded in cheers as 254 became World Champions for the second time in four years and simultaneously broke the Curie curse. Cheers included \”Curse goes Poof\” and the ever\\-popular \”Yeah buddy!\”\n”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/8874077c-14021429666_b73fb091e9_o-400×266.jpg”,”full”:”//media.team254.com/2014/04/8874077c-14021429666_b73fb091e9_o.jpg”},”text”:”254 used the infamous 3 ball autonomous even against 1114’s goalie pole”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/984307f0-14041809891_325a5f4c2f_o-400×266.jpg”,”full”:”//media.team254.com/2014/04/984307f0-14041809891_325a5f4c2f_o.jpg”},”text”:”The Team’s excitement after the final match”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/981d07eb-14041843352_7bb1826c2a_o-200×300.jpg”,”full”:”//media.team254.com/2014/04/981d07eb-14041843352_7bb1826c2a_o.jpg”},”text”:”EJ’s roar after winning was heard throughout the stadium”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/902f07b2-IMG_20140426_190225-400×300.jpg”,”full”:”//media.team254.com/2014/04/902f07b2-IMG_20140426_190225.jpg”},”text”:”Travis’ selfie with the team”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/04/98d807f0-10001099_655852797819277_7487597249566466903_o-400×266.jpg”,”full”:”//media.team254.com/2014/04/98d807f0-10001099_655852797819277_7487597249566466903_o.jpg”},”text”:”The Team on the field after the awards ceremony”}},{“type”:”heading”,”data”:{“text”:”Thank you!”}},{“type”:”text”,”data”:{“text”:”Team 254 would like to congratulate its alliance partners 469, 2848, and 74 for their invaluable contributions to the Championship victory and Teams 1114, 1678, and 1640 for the most intense matches that 254 had ever played. 254 also welcomes Team 27: RUSH into the Hall of Fame.\n”}}]}
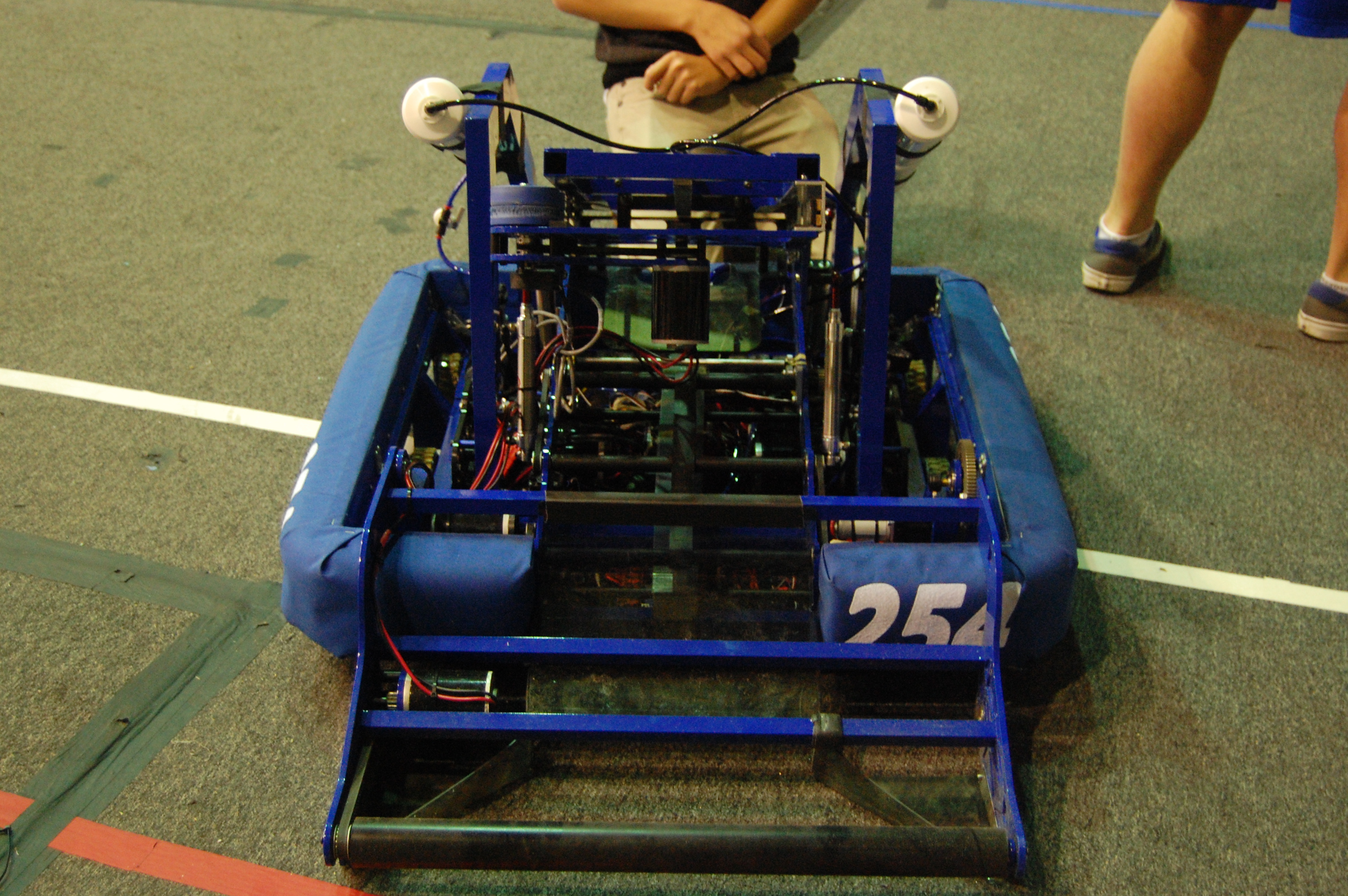
Team 254 Presents: Barrage
Team 254, NASA Ames Robotics “The Cheesy Poofs”, proudly presents our 2014 robot: Barrage.
Barrage will compete at the Central Valley Regional, Waterloo Regional, Silicon Valley Regional, and FIRST Championship.
Team 254 is sponsored by NASA Ames Research Center, Lockheed Martin, The Mercadante Family, Ooyala, TR Manufacturing, Qualcomm, HP, West Coast Products, The Magarelli Family, The Yun Family, Google, Modern Machine, The Gebhart Family, Aditazz, Cisco Meraki, Vivid-Hosting, Nvidia, BAE Systems, Gilbert Spray Coat, Pacific Coast Metal, S&S Welding, Good Plastics, Team Whyachi, Applied Welding, World Metal Finishing, The Jimenez Family, Hy-Tech Plating, and Bellarmine College Preparatory.
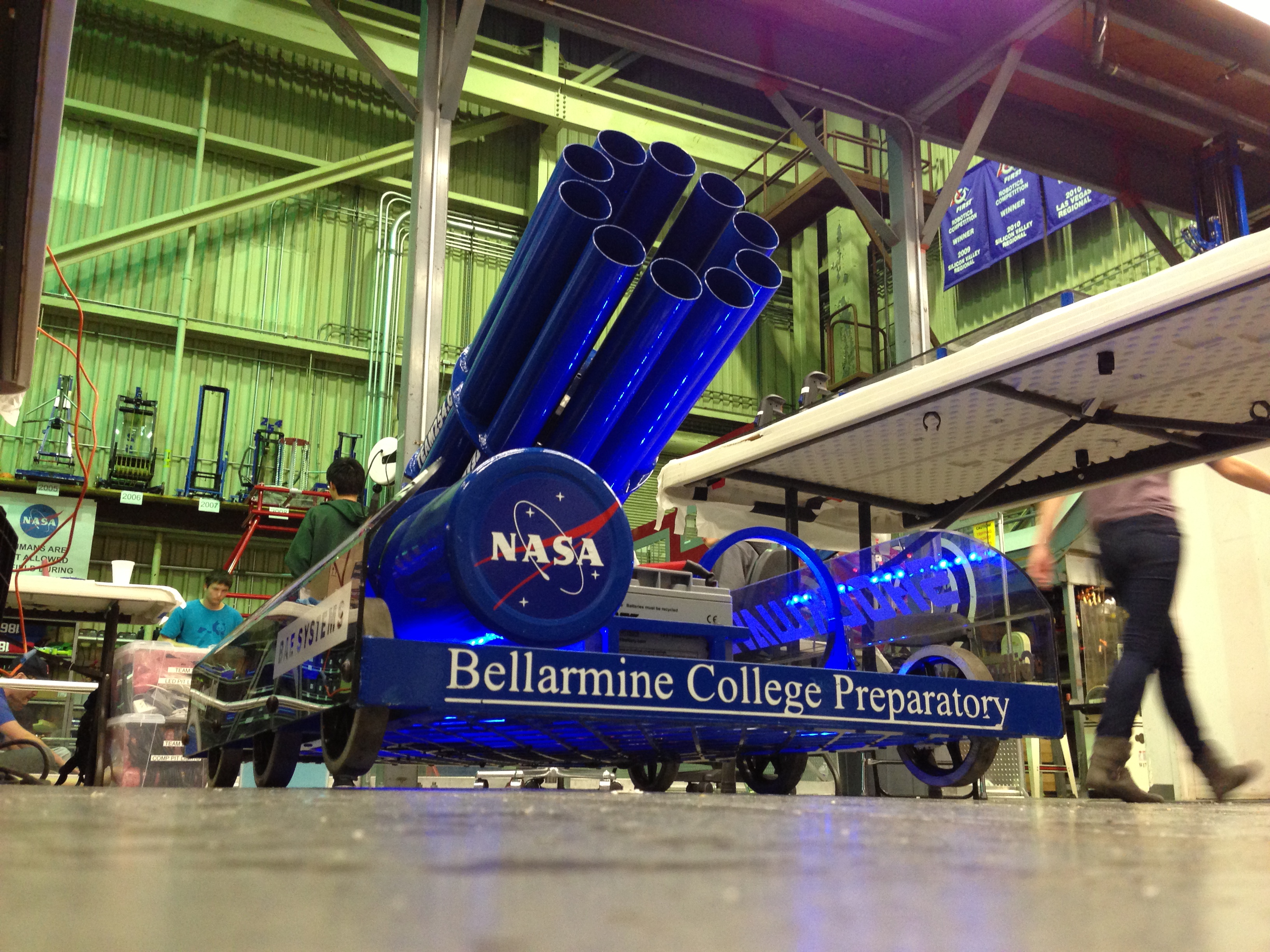
Shockwave Wins the Abbott Invention Hall of Fame Award
Shockwave, a promotional t-shirt shooting robot, was awarded the Abbott Invention Hall of Fame Award at the 2011 FIRST Silicon Valley Regional.


The T-Shirt Cannon at Your Event

Team 254 is willing and able to bring our T-Shirt cannon to many events, including but not limited to:
- Sporting Events
- Spirit Rallies
- Community Events
The T-Shirt Cannon can be branded to meet the promotional requirements of any sponsor.
To Request to have the T-Shirt Cannon appear at your event, please contact our PR Director, Godwin Vincent.
Pre-STL Day 9: Step into High Gear
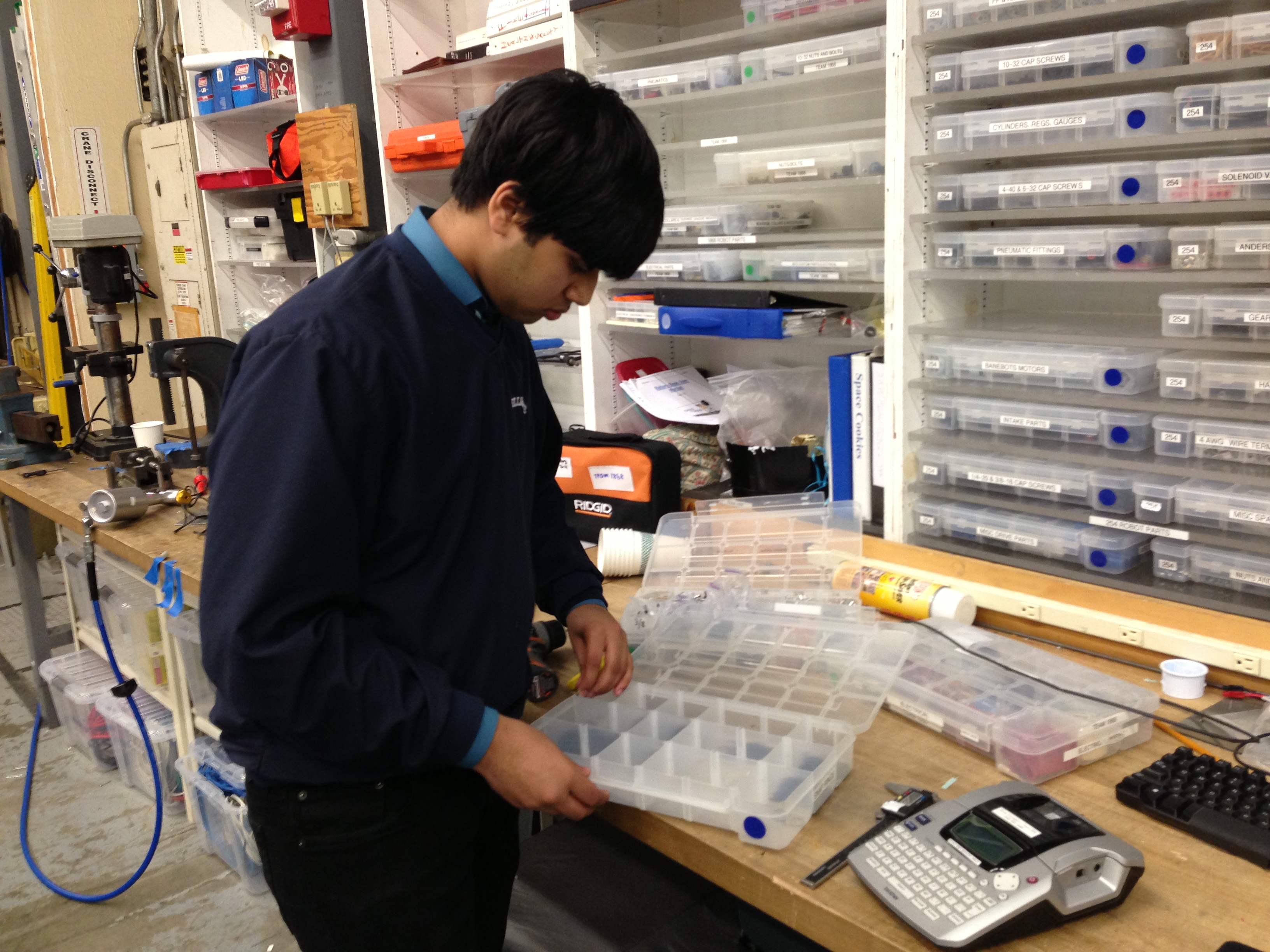
Manufacturing
Students started organizing new parts into their respective bins. Most of these parts will be spares for competition. In addition, a few mentors and students worked on deburring, polishing, and touching up parts which will be sent in for powder coating and anodizing.
Drivetrain
Students contine to fix the drivetrain. A dog gear broke yet again. Students worked on taking apart the drivetrain gearbox to replace it.
Intake
Students made new parts for the intake, including new mount side plates. Additionally, students began assembling the intake support gearbox.
Shooter
Students designed a one way valve in the shooter. This stop, made from a simple piece of bent polycarbonate, will allow the frisbee to leave the shooter in only one direction and prevent it from falling backwards. This stop is a simple mechanism to further eliminate possible jams that have plagued the robot for the better part of the season.
Other
Teams 973 and 846 stopped by to the lab for practing and tuning in preparation for the World Championship next week.
Pre-STL Day 8: Rolling with It
Shooter/Indexer
Students and mentors worked diligently to replace one of the intake rollers with a BBD. Students also worked to troubleshoot an issue with the new intake hardstop that was causing hang-ups on the intake system.
Manufacturing
Working diligently to manufacture new intake gearbox plates to save weight, students cut stock metal to be milled in the CNC.
Pre-STL Day 4: Engineering Priorities for Time Constraints
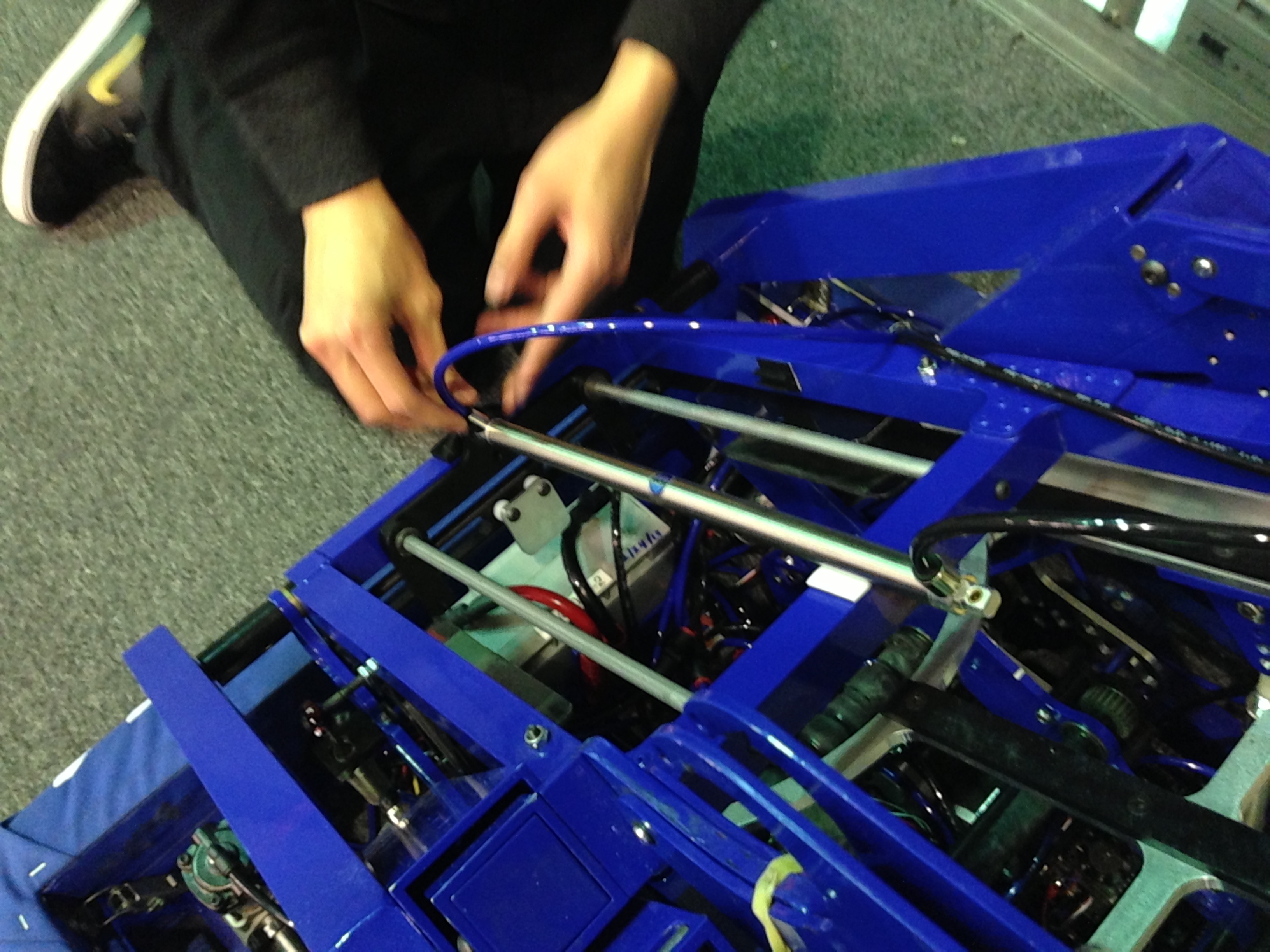
Intake
Students worked to carefully repair the intake when it broke this morning. They had to pause momentarily to remove the intake and fix it on the side.

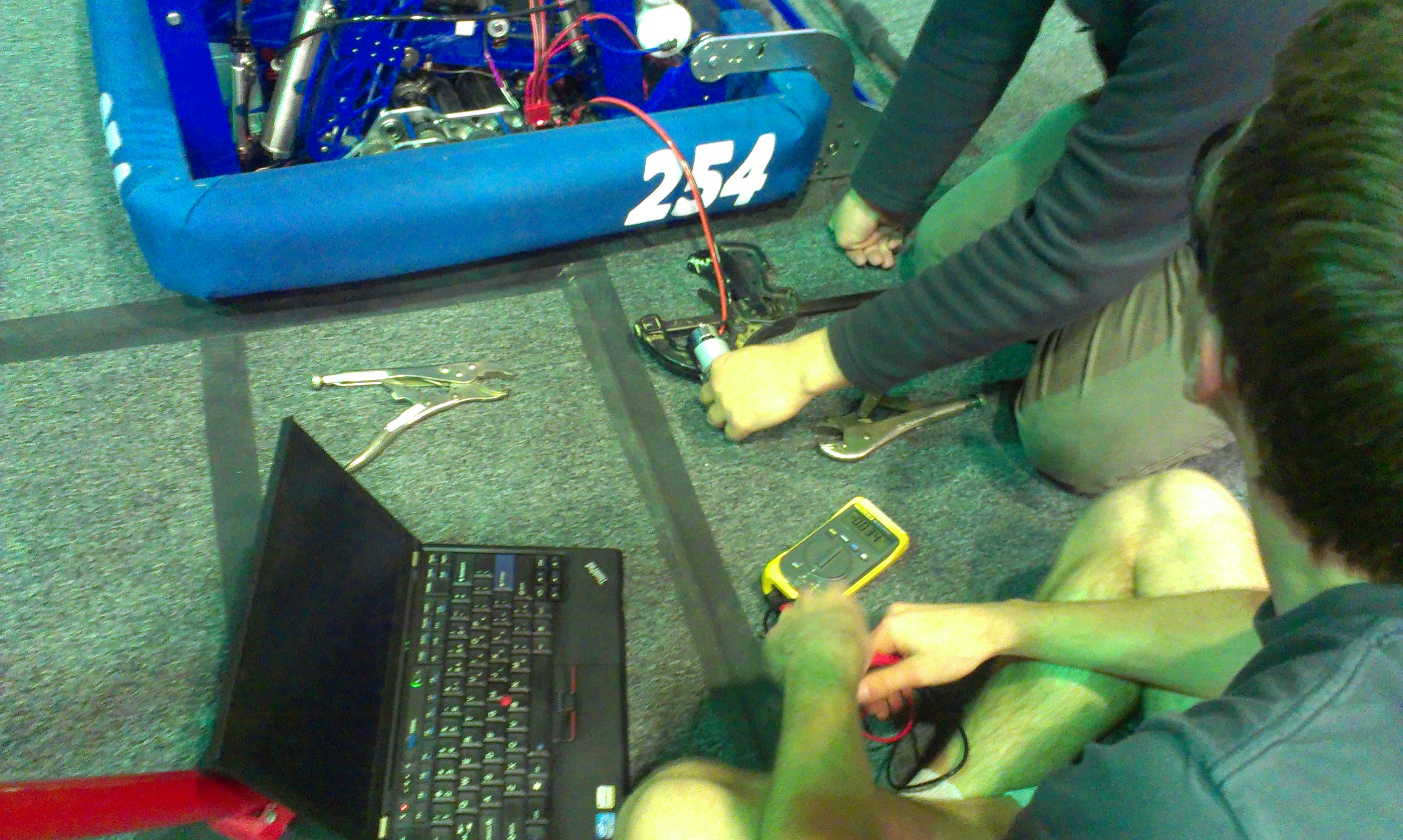
Fixing the Intake

Jonathan Lee debugging the robot
Design
Due to the fact that there are only two weeks remaining before World Championships in St. Louis, a lot of the team’s new redesign ideas needed to be reconsidered realistically. While the progress of designing a bucket indexer seemed promising for spectacular scoring, it needed to be put on hold so that the team could focus on other important design tasks. In addition, it would require a major redesign or would bring up weight issues easily. The team decided to refine and work out the issues it currently has. The benefits of the major redesigns are not worth their risks, and it will be a much better use of time to work out the small issues the robot currently has.
Currently, the team is using Solidworks to design a new intake gearbox that would not make the motor burn out as quickly as the Banebot motor does now. In addition, the new gearbox will eliminate a VEX planetary from the robot.
Testing the intake Banebot motor
Another important task includes making indexer hard-stop mechanism to prevent frisbees from jamming and stacking inside the indexer. This addition is a major improvement that is a top priority. This hard stop needs to be simple, passive, and reliable. Most likely, the stop will be mounded to the conveyor side plates. The stop itself will be lowered as the indexer mechanism is lowered. As the indexer is raised, so will the hard stop to forbid the frisbee from moving forward.
Driver Practice
Abhi Kumar and Jonathan Lee practiced driving the robot around to improve positioning consistently and prepare for competition scenarios.

Abeek and JLee driving abhsentmindedlee
Pre-STL Day 2: Cleanup and Buckets
Cleanup
Students started today’s build session with a general clean up after dinner, including a full cleanup of the upstairs area and a more specific unpacking.
Buckets
After the cleanup, investigation on the buckets continued, and it was learned that if a bar applies pressure on the bucket in the part nearest to the conveyor, a system is created which prevents upside down frisbees from joining the stack. However, this only works if the first disc is intaked right side up. Furthermore, work was done on a system which gets discs from the human player.
Programming
The programmers worked on a couple of classes which allow for certain buttons to take effect, even when the robot is disabled. These buttons include ones which reset the gyros in the robot and select autonomous code. In addition, there were minor refactorizations of the code.
Pre-SVR Day 17: Hangin’ by a Thread
Today was an eventful day to say the least. The team worked hard to finish the necessary tasks before SVR including packing, calibrations, and assembly of subsystems for the competition robot. A new hanger was assembled for the comp bot as well.
Programmers
Programmers worked primarily on the hanger today, using gyros on the robot to calibrate the hang and make the autonomous work accordingly. After hours of testing and calibrations the programmers were fine tuning the timing of the hang phases.
Robot
The drive team practiced with the robot today, in order to get ready for SVR and practice getting setup for hanging. However, unfortunately while practicing hanging, the robot dramatically fell off the top of the pyramid and consequently suffered some damage; a belt on one of the hangers broke. Since we do not have enough spare belts we cannot fix the practice bot hangers until after SVR. On another note, the students replaced the banebots wheels on the shooter with a polyurethane wheel to test if it significantly improved results. However, this new wheel did not seem to improve the robot’s shooter. After SVR, the team will look for other options for wheels.
Manufacturing and Assembly
Today students recieved the powder coated hanger and intake parts, and worked on assembly drive gearboxes and hanger mechanisms to bring to SVR and equip on the competition robot. Afterwards, students worked on making polycarb flaps for the loading mechanism on the robot.



Packing for SVR
Students began to pack items needed for competition at SVR including the toolchest, and part bins. The clear part bins were packed intro crates 5, 2, & 3. Additionally, boxes 8 and 4 were consolidated into one, and box 1 was packed with important programming parts and tools. Finally box 7 was packed with small clear boxes of parts.
Lab Closing Time: 3:00 AM
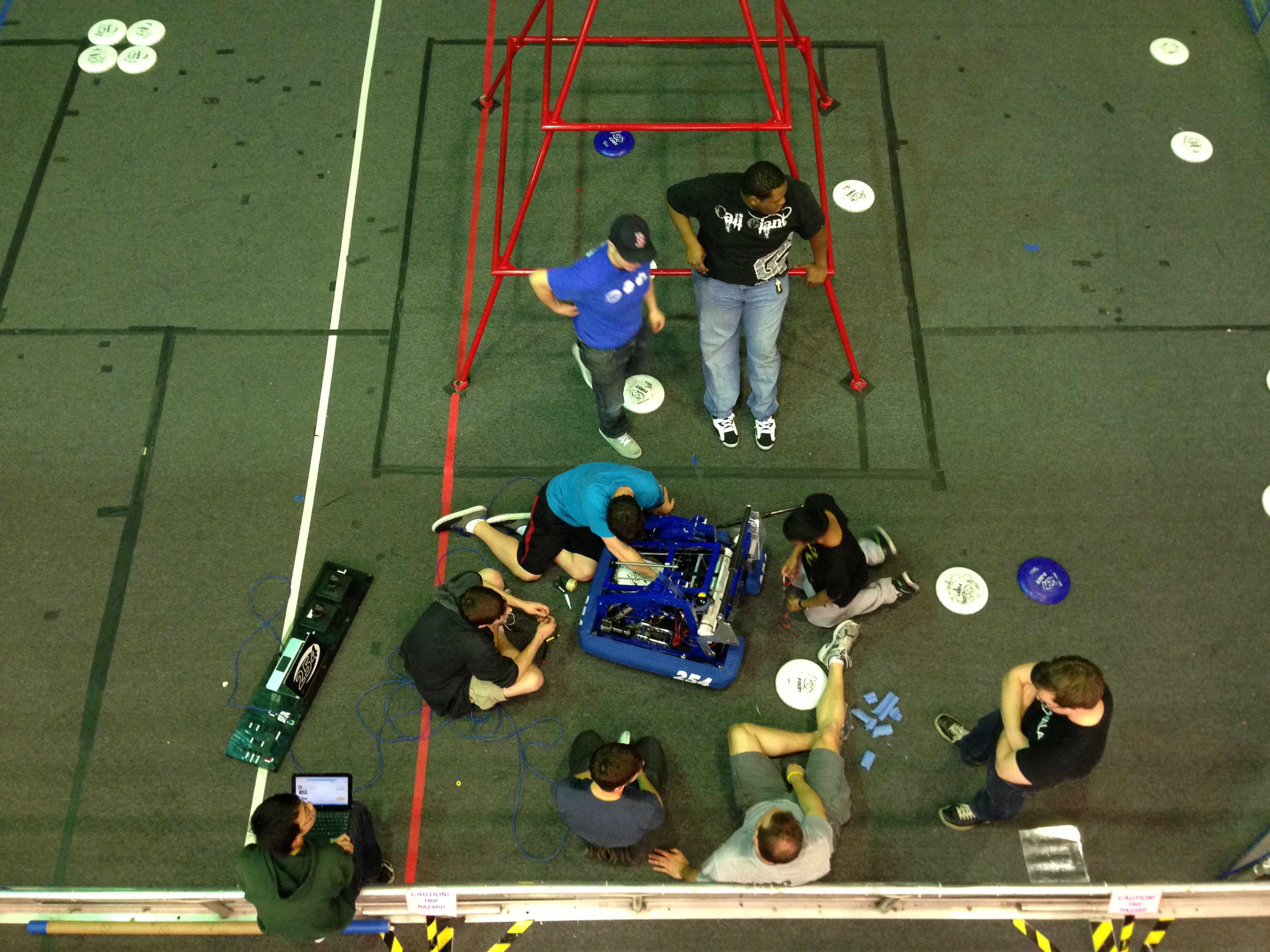
Pre-SVR Day 16: Open Field
Open Field
Today the lab was opened for Teams 4543 (Apollo High School) and Team 971 to use our field for calibration and driver practice, while working on bugs in preperation for SVR (where both robots will be competing).
Driver Practice
Today Driver Abhi Kumar, and Operators Chris Sides and Scotty Cardona all practiced on the field, specifically picking up discs from the area around the pyramid and shooting into the high goal from the pyramid. The robot was about 76% accurate (data taken by scouts). We hope to improve accuracy to over 90% before SVR. One of the main points of improvements are the BaneBot shooter wheels that need replacing.

Nick Mercadante replacing the battery
Chairman’s Award
Today students took many major steps in preparation to present the Chairman’s Award at SVR. One aspect of this work was the development of the the team binder, with students formatting the various pages of the binder. Additionally the presenters (Richard Lin, Alex Powers, and Nagy Hakim) prepared for the judges interview, working on the power point and the question and answer section.
Manufacturing
Students constructed beam sensor mounts for the robot. These beam sensors will be used to determine whether or not a disc has reached the back of the conveyor to be properly indexed.

Andrew Torrance machining shafts

Joshua Vincent cutting sensor mounts

Mani Gnanasivam milling parts
Hanger
Furthermore, the development of the hanger continued, with elevator belts being tensioned, and manufacturing shafts for the belt. Two of the three new hangers are ready to be attached to the competition bot, with the third functioning as a spare to be put on either side; due to this orientability, it will not be fully assembled until it is attached.

Andrew torrance assembling the hanger
Lab closing time was: very late.
Overkill Teaser
On Wednesday, the team said that if we reached 2540 likes on our Facebook page or 2540 followers on our Twitter Account by April 3rd, a video of the world’s fastest 30 point hang would be released. The threshold was met on the Facebook page just a day later on Thursday the 28th.
This is that video.
Pre-SVR Day 13: Defense
 After a quick driver’s practice today, a programming issue occured with the autofire shooting. With the indexer physically jamming as well as the software causing jamming while shooting, practice was stopped and efforts were put towards making sure the robot was fully functional. After the programming and hardware issues were solved, drivers continued practicing.
After a quick driver’s practice today, a programming issue occured with the autofire shooting. With the indexer physically jamming as well as the software causing jamming while shooting, practice was stopped and efforts were put towards making sure the robot was fully functional. After the programming and hardware issues were solved, drivers continued practicing.
Intake
Last night, wooden support blocks were added to the practice robot’s intake to help keep the polycarbonate bottom plate pushed to the ground. No other modifications were made to the intake, and in its current state it is working moderately well.
Shooter/Indexer
The new indexer system that feeds one frisbee at a time has eliminated the issue of the indexer not fully engaging over the frisbee, which caused jamming (such as in San Diego). While testing today, frisbees were jamming below the indexer, which students quickly discovered was caused by a loose piston Tightening the piston solved any jamming issues. Continued testing of the shooter proved extremely improved consistency and power while using the new banebot motors.
Slipstream
Slipstream was brought to NASA from its home at the Bellarmine Robotics lab and repaired by students today. After being restored to driving condition and reprogrammed by students, it is up and running and ready to be used to practice defense. Students and mentors will drive Slipstream as a defensive robot while the drive team runs drills with Overkill to give a more realistic situation and challenge them to adapt to a multitude of different scenarios.

Competition Preparation
In preparation for SVR, students populated a list of supplies to buy, as well as continued to organize the current list with new bins that were bought. By separating the different supplies into individual bins the process of pit setup will be streamlined, as well as creating a more organized pit overall.
Pre-SVR Day 12: Regroup and Rethink
 After ten minutes of driver practicing, the team still determined that one glaring problem still exists that currently precedes all others: the robot’s intake system inconsistently picks up frisbees.
After ten minutes of driver practicing, the team still determined that one glaring problem still exists that currently precedes all others: the robot’s intake system inconsistently picks up frisbees.
Intake
The team technical leaders gathered to decide on a solution for the intake problem.
Issues:
The daunting issue ahead
- Frisbees stack on top of each other inside shooter indexer
- Intake shelf/ramp causes discs to stall
- Whether or not bottom roller should be used
After a comprehensive discussion about the next step, the team concluded that the next step would be to revert back to the old intake and iterate from there.
Solution to test:
- Remove frisbee ramp
- Replace bottom roller
Shockwave
Further development of the T-shirt cannon, Shockwave, was continued today, led by Richard Lin. The programming team added the indexing code which rotates the barrels for the next shot. Controls are still under maintenance to ensure safe and proper performance during exhibitions. This will require extensive robot testing by mentors before it can be used in public.

Students developing the controls
Code Testing
A heroic perspective of Shockwave

Tom is impressed
Pre-SVR Day 9: Edgy Intake
Overkill:
Tests were conducted using a knife-edged polycarbonate sheet added to the bottom of the intake tonight in order to improve the effectiveness of the intake system. New rails have been integrated into the shooter system. The tests are still underway and there have not been any conclusive results yet.
Shockwave:
Due to issues with establishing connection to the robot students replaced the old cortex and troubleshooted faulty wiring. There is still work to be done and students will continue to work to make Shockwave functional again.
Sponsor Invites:
Invitations to the Silicon Valley Regional were sent to almost all of our sponsors tonight.
Pit Lighting:
Pit members worked on creating an easier means to set-up and transport the LED strips used for Pit lighting. Their fragility and difficulty to set up significantly complicates setting up the pit Thursday morning.
San Diego Regional in Progress
Our team has arrived in San Diego in one piece, and is doing great. The pit is set up, we’ve passed inspection, and apparently, the waffles at the hotel are amazing. If you’re looking for quick updates, our team Facebook page is a great place to look, you will be able to find pictures, statuses, and updates on team. Additionally, if you’d like to watch the games live, head over to
//www.justin.tv/frcsd?utm_campaign=live_embed_click&utm_source=www.thebluealliance.com
Here, you’ll be able to watch the livestream of the event, from qualification rounds to finals. It will open up at 8:30 AM PST Friday (March 8th), so be sure not to miss any of the action!
Wish us luck, and go Poofs!
Driver Practice and Intake Modification
Driver Practice:
 Drivers and operators continued practice today in preparation for the upcoming San Diego Regional. To hone their skills they ran a multitude of drills with a wide variety of obstacles to simulate a field filled with other robots. In these drills the drive team is fed 1 frisbee at the near side of the field, they then move as fast as they can to the opposite side without hitting any obstacles and shoot alternating between near and far pyramid shooting positions. If they fail to do this or hit any obstacles, there is a penalty of 5 pushups per violation, enforced by Mr. EJ.
Drivers and operators continued practice today in preparation for the upcoming San Diego Regional. To hone their skills they ran a multitude of drills with a wide variety of obstacles to simulate a field filled with other robots. In these drills the drive team is fed 1 frisbee at the near side of the field, they then move as fast as they can to the opposite side without hitting any obstacles and shoot alternating between near and far pyramid shooting positions. If they fail to do this or hit any obstacles, there is a penalty of 5 pushups per violation, enforced by Mr. EJ.
Robot Intake and Maintance:
 The side plates for the new intake design were completed today. Students worked with mentors to install the new plates as well as modify parts of the old intake to work with the new design. While it was not a very smooth action the new intake works much better, showing no obvious signs of jamming when intaking at slow speeds. As well as funneling better, the new intake also weighs 3-4 pounds less than the previous design. Students also removed unused pistons and sensors from the indexing system to shed weight.
The side plates for the new intake design were completed today. Students worked with mentors to install the new plates as well as modify parts of the old intake to work with the new design. While it was not a very smooth action the new intake works much better, showing no obvious signs of jamming when intaking at slow speeds. As well as funneling better, the new intake also weighs 3-4 pounds less than the previous design. Students also removed unused pistons and sensors from the indexing system to shed weight.
Bill of Materials:
Students continued the documentation process by separating the robot into subsystems and accounting for each part on the bill of materials. With the constant iterating of the robot, they will have to keep the list updated every day. Currently, they have almost fully completed documenting 5/6 subsystems, consisting of the intake, conveyor, shooter, hanger, and bumper. The drivebase is still a work in progress.
Programming:
The programmers debugged code for the robot’s drive. Other than this, they added support of the control loops switch on the control board to how the indexer command operates. Also, the programmers rewrote the logic for the stage 1 hanger solenoids.
Pit Lights
Other programmers worked on the pit display and colorful pit lights. These lights will be installed in the trussing in the pits to add a glow effect to the piping. They took last year’s match schedule script and modified it to remove the Coopertition points column, as well as to create a configuration form so that other teams can utilize the system. They also worked on the web application that will send led script files to the C# application that controls the lights. It will be done soon.
General Competition Preparation:
Students finished wiring the new 2013 batteries tonight and are currently in the process of testing them. Using a battery analyzer each battery is tested to see the quality individually before competition.
Driving Practice and Lights
The main focus of build today was to iterate the shooter index mechanism to improve consistency. Many other projects were run on the side including pit lights, Social Media award, Chairman's award, and the Bill of Materials.
Design
Students designed a new robot stand on Solidworks. They fixed the current robot stand by giving the robot less room to slide and by allowing it to fit into the robot cart.
Other students and mentors continued working on new designs to improve the functionality of the intake.
Mechanical
In the past week, the team experienced many difficulties trying to index frisbees consistently. They manufactured a new frame for the indexer and replaced the polycarbonate side hooks with ones in a steeper angle. The robot now appears significantly more efficient in transferring frisbees from the intake to the shooter.
Upgraded practice robot
Driving
The drive team practiced maneuvering through the field and inside the pyramids in preparation for next week's tournament in San Diego.
Programming
The programmers change the configuration of the operator controls and tested autonomous mode. They changed the shooter switch so it now only changes speed and not angle.
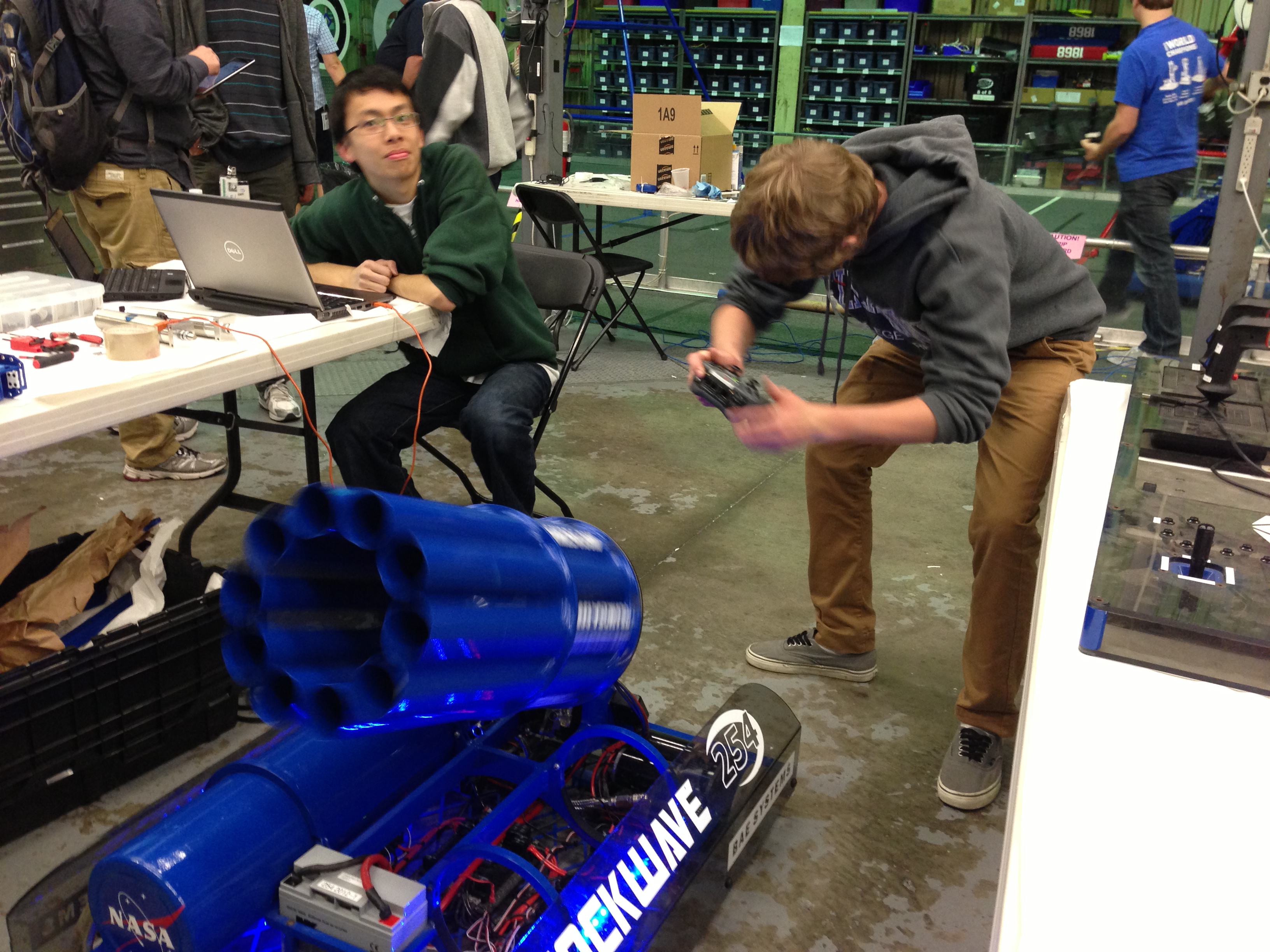
Meanwhile, Pat obtained a lightweight USB scanner (Scansnap) for use with scouting matches at competitions. Currently, the software is set up to scan each sheet (starting with the bottom of the stack, allowing more sheets to be added simultaneously) and save it as an image file. He is currently working on code to recognize and read certain parts of the sheet (QR code, bubbles).
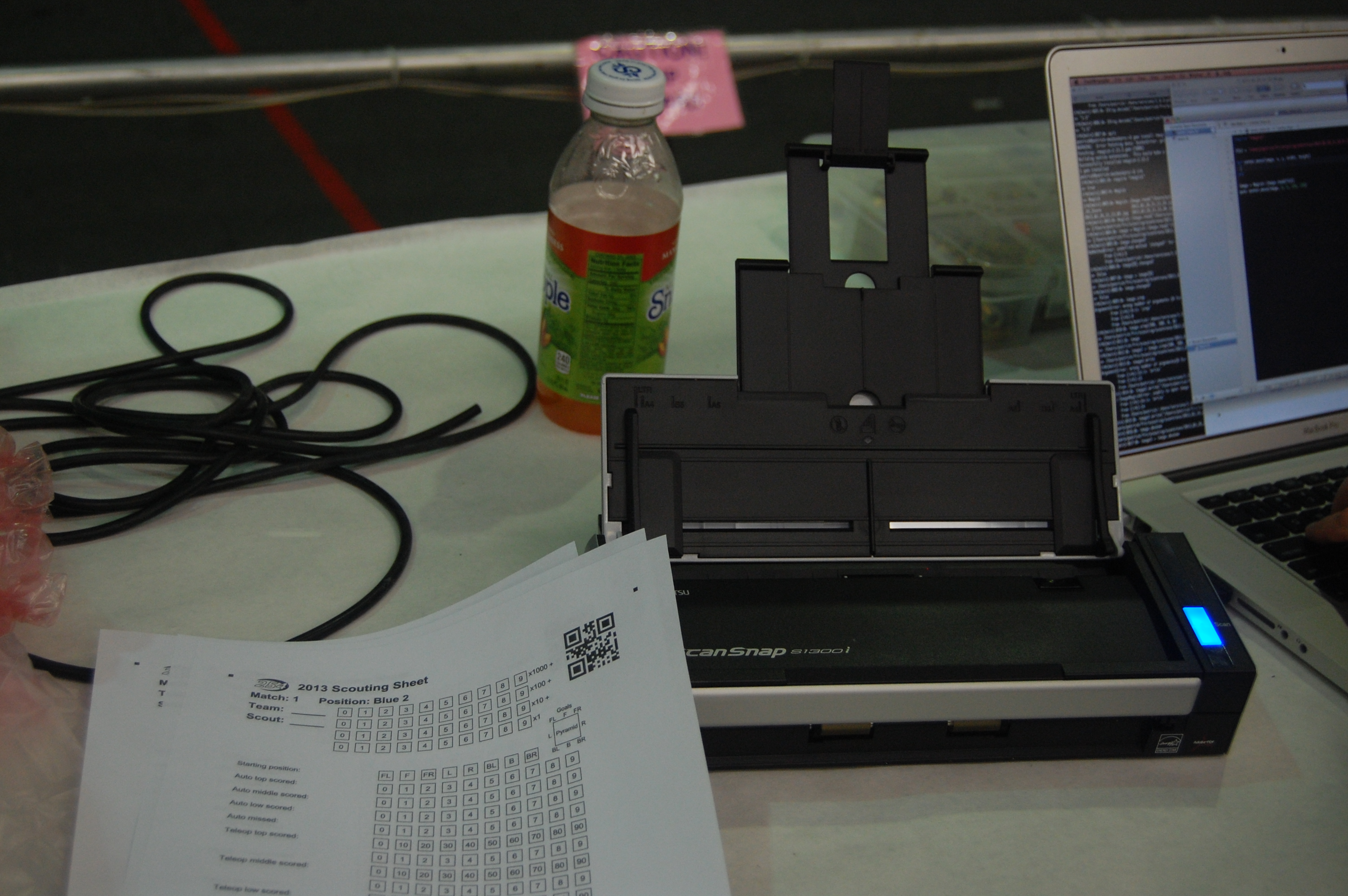
Scan-tastic!
Pit Lights
Students wired the pit flood lights and are working on the power supply for them.
Other programmers worked on the pit LEDs and were able to use an off-the-shelf IR module (receiver) to capture the signals sent by the remote controller. They then changed the configuration of items on the breadboard and replaced the IR module with an IR LED (transmitter). Using the data, they managed to emulate the remote and send signals to the lights to change their color.
There was a small issue where the lights turned themselves off occasionally when they were sent remote signals. The code for this project will be uploaded to GitHub.

The box o' lights
Action Items
-
Enhance intake system
Expected closing time for the lab: 12:00
