
Pre-SVR Day 17: Hangin’ by a Thread
Today was an eventful day to say the least. The team worked hard to finish the necessary tasks before SVR including packing, calibrations, and assembly of subsystems for the competition robot. A new hanger was assembled for the comp bot as well.
Programmers
Programmers worked primarily on the hanger today, using gyros on the robot to calibrate the hang and make the autonomous work accordingly. After hours of testing and calibrations the programmers were fine tuning the timing of the hang phases.
Robot
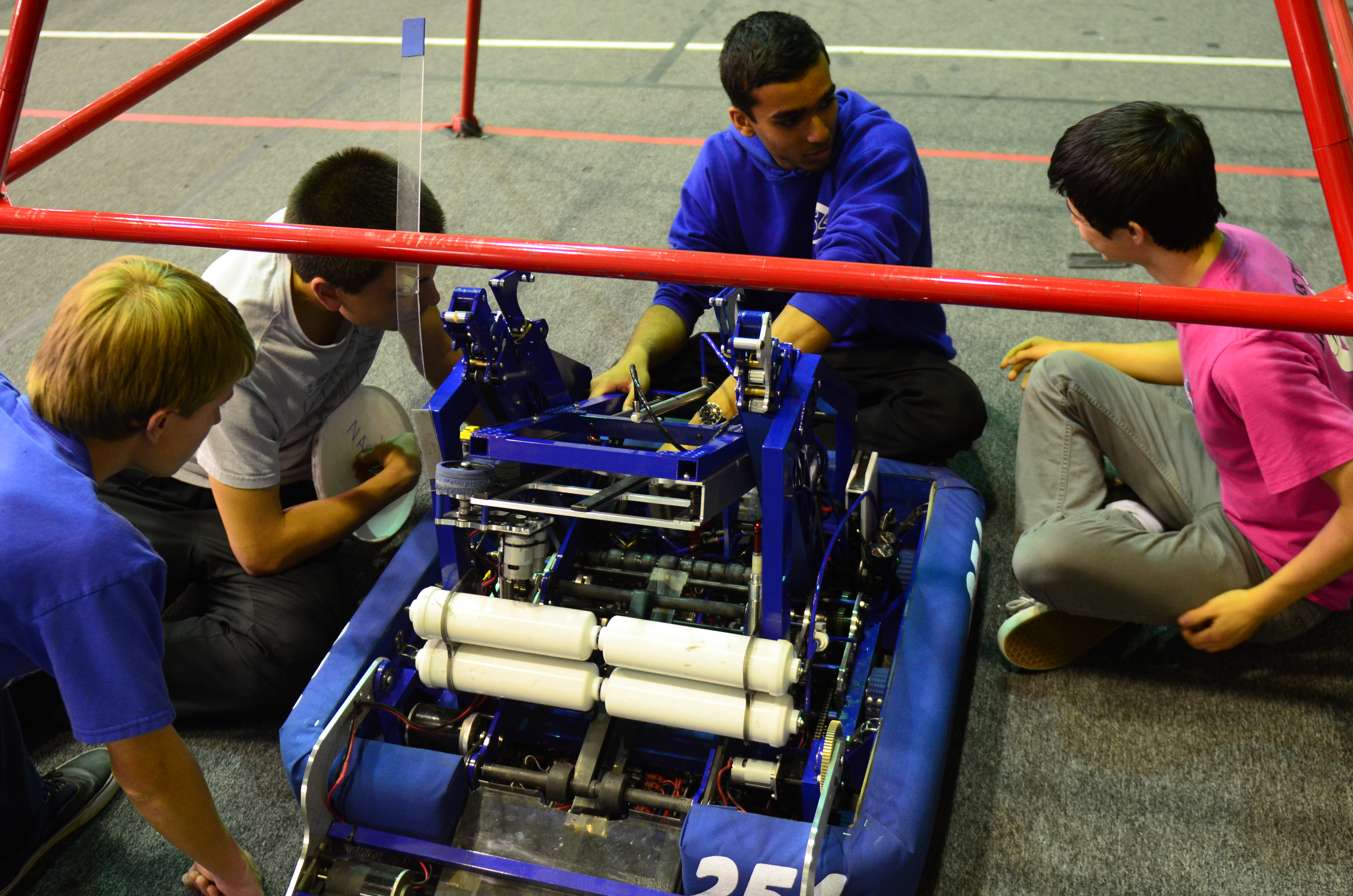
The drive team practiced with the robot today, in order to get ready for SVR and practice getting setup for hanging. However, unfortunately while practicing hanging, the robot dramatically fell off the top of the pyramid and consequently suffered some damage; a belt on one of the hangers broke. Since we do not have enough spare belts we cannot fix the practice bot hangers until after SVR. On another note, the students replaced the banebots wheels on the shooter with a polyurethane wheel to test if it significantly improved results. However, this new wheel did not seem to improve the robot’s shooter. After SVR, the team will look for other options for wheels.
Manufacturing and Assembly
Today students recieved the powder coated hanger and intake parts, and worked on assembly drive gearboxes and hanger mechanisms to bring to SVR and equip on the competition robot. Afterwards, students worked on making polycarb flaps for the loading mechanism on the robot.



Packing for SVR
Students began to pack items needed for competition at SVR including the toolchest, and part bins. The clear part bins were packed intro crates 5, 2, & 3. Additionally, boxes 8 and 4 were consolidated into one, and box 1 was packed with important programming parts and tools. Finally box 7 was packed with small clear boxes of parts.
Lab Closing Time: 3:00 AM
