Pre-SVR Day 13: Defense
 After a quick driver’s practice today, a programming issue occured with the autofire shooting. With the indexer physically jamming as well as the software causing jamming while shooting, practice was stopped and efforts were put towards making sure the robot was fully functional. After the programming and hardware issues were solved, drivers continued practicing.
After a quick driver’s practice today, a programming issue occured with the autofire shooting. With the indexer physically jamming as well as the software causing jamming while shooting, practice was stopped and efforts were put towards making sure the robot was fully functional. After the programming and hardware issues were solved, drivers continued practicing.
Intake
Last night, wooden support blocks were added to the practice robot’s intake to help keep the polycarbonate bottom plate pushed to the ground. No other modifications were made to the intake, and in its current state it is working moderately well.
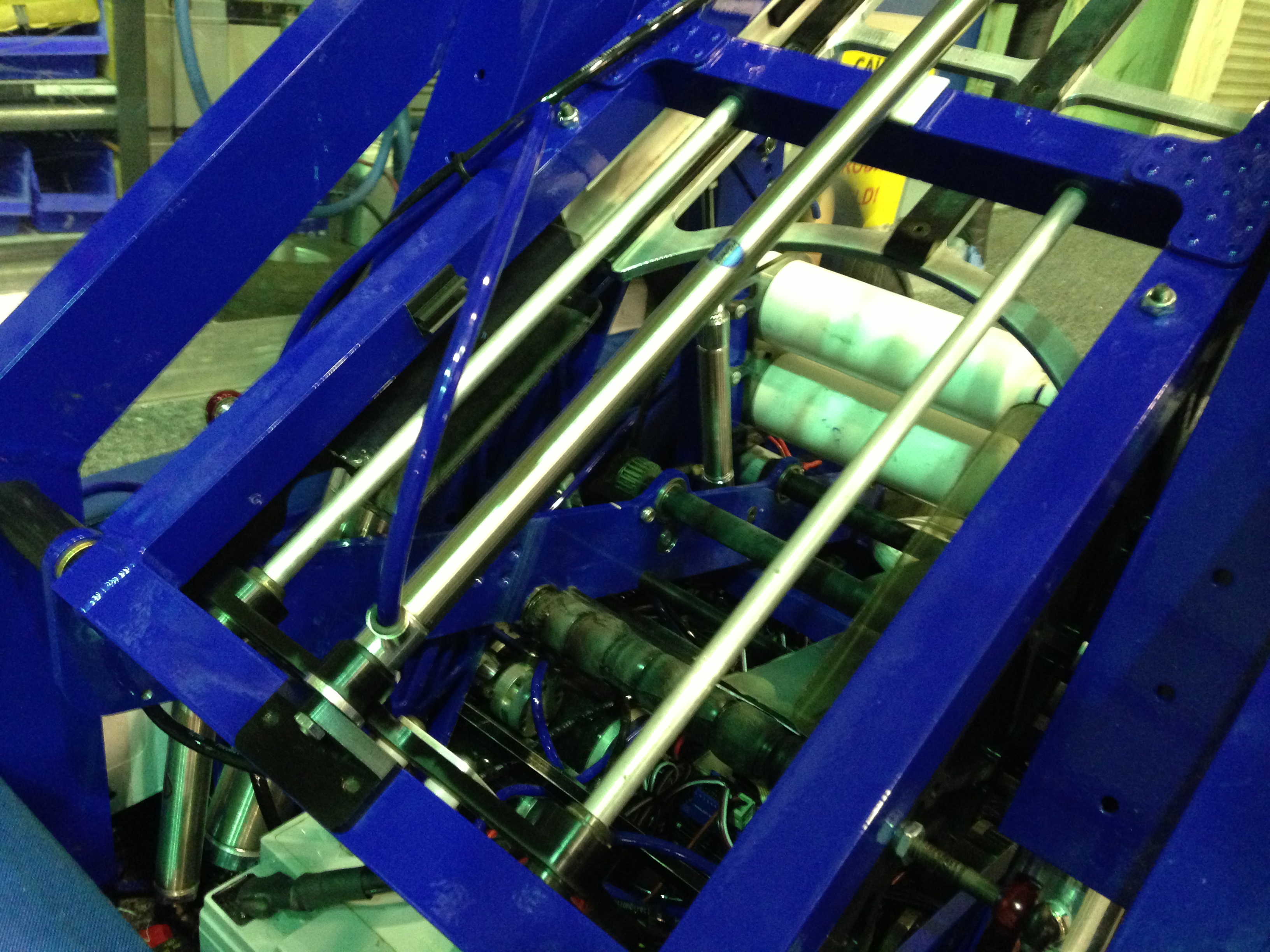
Shooter/Indexer
The new indexer system that feeds one frisbee at a time has eliminated the issue of the indexer not fully engaging over the frisbee, which caused jamming (such as in San Diego). While testing today, frisbees were jamming below the indexer, which students quickly discovered was caused by a loose piston Tightening the piston solved any jamming issues. Continued testing of the shooter proved extremely improved consistency and power while using the new banebot motors.
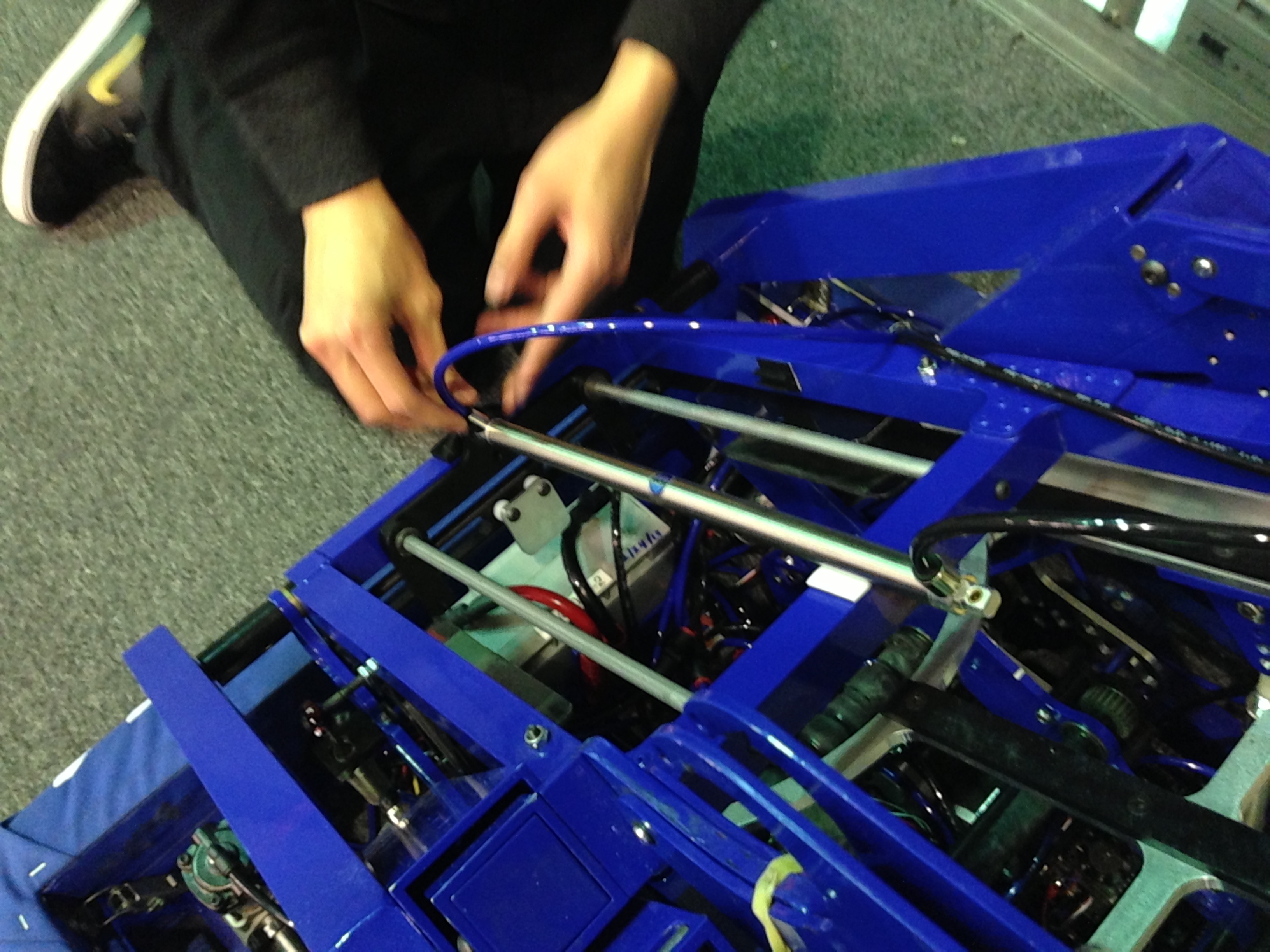
Slipstream
Slipstream was brought to NASA from its home at the Bellarmine Robotics lab and repaired by students today. After being restored to driving condition and reprogrammed by students, it is up and running and ready to be used to practice defense. Students and mentors will drive Slipstream as a defensive robot while the drive team runs drills with Overkill to give a more realistic situation and challenge them to adapt to a multitude of different scenarios.

Competition Preparation
In preparation for SVR, students populated a list of supplies to buy, as well as continued to organize the current list with new bins that were bought. By separating the different supplies into individual bins the process of pit setup will be streamlined, as well as creating a more organized pit overall.