
Blog - November 2019
2019 Bellarmine VEX Tournament
A Brief Summary
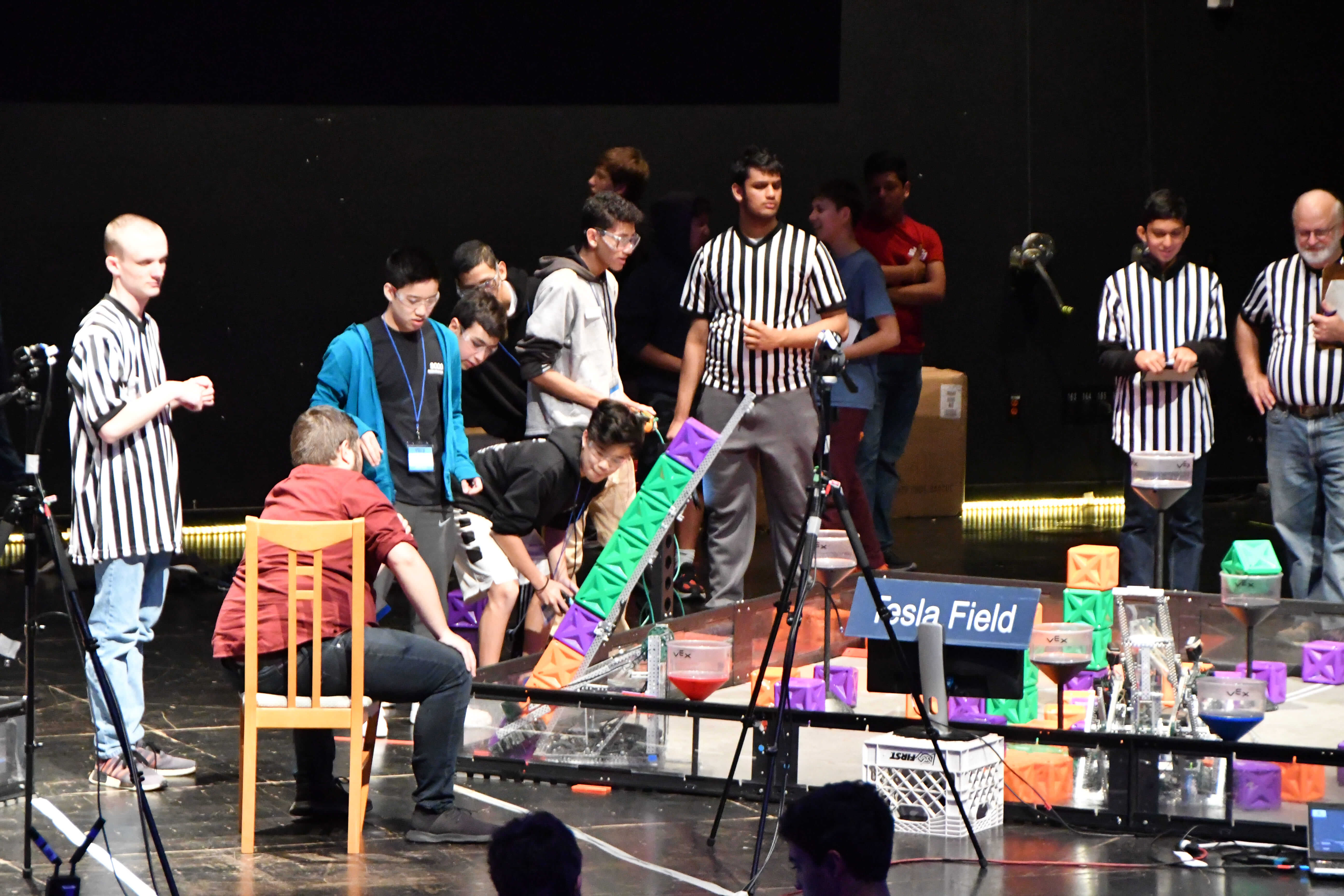
This past weekend, we hosted the Bellarmine Bay Area VEX Tournament, an annually hosted tournament hosted by Team 254’s VEX Program. We had five of our VEX Teams (254B, 254D, 254F, 254W, 254X) compete in the tournament. Congrats to VEX Team 315K Paradigm and VEX Team 3324V Supernovas-Fusion for winning the tournament! We would also like to shoutout VEX Team 3324V for winning the Robot Skills section of the tournament and VEX Teams 95070A Redwood Robotics and 315K Paradigm for winning the Excellence Award.

Event Summary and Highlights
General Summary
Overall, the tournament ran smoothly, we had no major hiccups throughout the event and everyone seemed to have had a great time. Our teams saw varying success, as our VEX teams D, W and F made it to eliminations. This event had many firsts for Bell Vex History, to mention a few, this was the first to have a Bell Vex Logo, and the first to have live scoring.
Robot Performance
254B
Throughout the tournament 254B was struggling with many issues. Most of the issues stemmed from connection and software issues. The robot’s hardware performed well, but not being able to control the hardware lead to this team’s demise. Unfortunately, this team placed last in the tournament. But, it was a great learning experience for the team.
254D
This team was also struggling with various software issues, their automatic positioning system was not working according to plan, leaving them to recreate their autonomous routes throughout the tournament. They were also having trouble getting their massive tray to deploy properly. Ultimately, they ended up near the bottom of the rankings. Because of their past success, 254W chose to pick them as their alliance partner, but lost in the round of 16.
254F
During the qualification matches, the robot performed really well, we were able to slow down the other teams with our very defensive robot. The six motor drive base really helped us push through all the cubes and defend very effectively. Our new and improved arm allowed us to be the fastest team at scoring cubes into the towers while also being able to stack cubes reasonably quickly. We ended up ranked in 7th place and we made it all the way to semifinals.
254W
This team had won 4 of 6 qualification rounds and placed in 20th after qualification rounds. Their new intake design was not working according to plan, causing them to focus on tower control instead of their designed purpose, cube stacking. Fortunately this worked out for their benefit, this team became ranked 23th and decided to choose 254D as their alliance partner. They then lost in the round of 16.
254X
Throughout qualification matches this robot struggled quite a bit. Resulting in 2 wins and 4 losses, this team placed in 45. They had issues stemming from their lift and intake. These issues resulted in slow intake speed and an inability to score very quickly or in high quantities.
A Special Thanks

At Bell Vex, we would not have been able to be so successful without the amazing teams that attended the tournament. We would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, teachers, and parents who helped run the tournament smoothly.


Madtown Throwdown Offseason Tournament
A Brief Summary
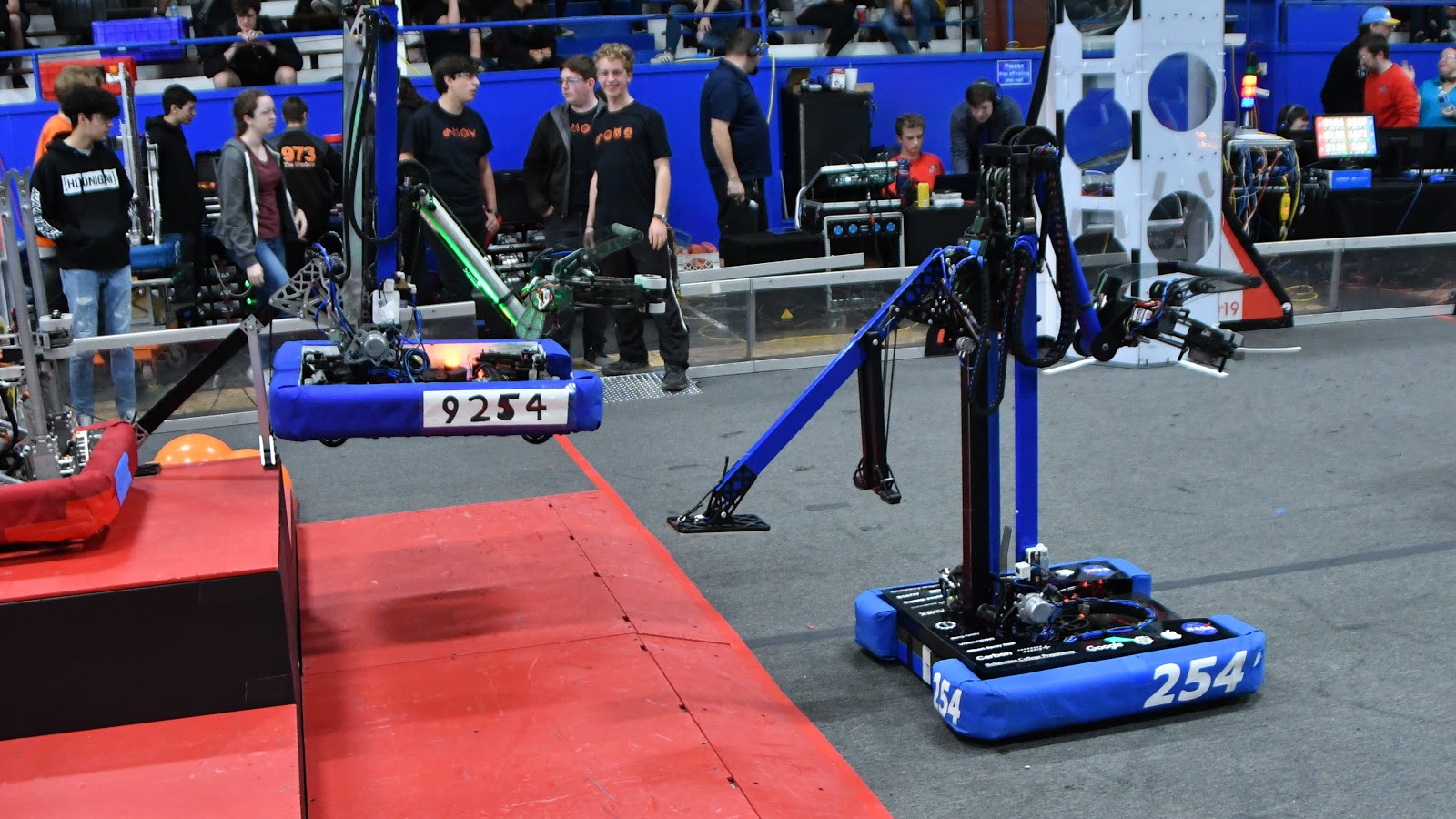
This past weekend, we attended Madtown Throwdown, an annually hosted offseason tournament hosted by Team 1323 (Madtown Robotics), in Madera, CA. We had a great time jumping back into action with our robot, Backlash, before the start of the 2020 FRC Season. Shoutout to FRC Team 1323 MadTown Robotics, FRC Team 1678 Citrus Circuits, and FRC Team 971 Spartan Robotics, for winning the tournament!

Team 254’s Backlash and Swerve Bot in an alliance together before an upcoming match
Event Summary and Highlights
Robot Performance (Backlash)
Backlash approaching the HAB zone for a climb before the end of a match
Throughout our qualification matches, we sought to earn the maximum number of ranking points, which meant prioritizing scoring in the rocket in every match to get the rocket RP, as well as climbing and scoring enough points to win. We employed a new rocket RP scoring style that allowed us to utilize our partners well. Since the opposing defense was much better at Chezy Champs, we focused on the top two levels of the rocket and let our partners score on the first level. The HAB RP was a bit harder because of the increased point requirement. Thus, we made sure to always climb successfully and also get our partners to park on the platform. We consistently scored double climbs in our matches.
By the elimination period, we focused on simply winning our matches. We scored as many points as possible by scoring as many cargo balls as possible since they were worth more than hatches. We wanted to score enough hatches such that we had multiple points to score at any moment and avoid getting caught up by defense. We ran our cargo ship autonomous program to place hatch panels on the first two side slots of the cargo ship and then filled the rocket during most of our matches. Sometimes, we switched between the task of scoring hatches and cargo with our alliance partners to confuse defensive opponents.
Alliance Selection (Backlash)
Going into the elimination period, we formed an alliance with Team 1323 MadTown Robotics, Team 4698 Raider Robotics, and Team 6174 Kaprekar’s Constants.

Team 254 representative, Garrett Blosen, poses with our chosen alliance partners
Robot Performance (Swerve Bot)
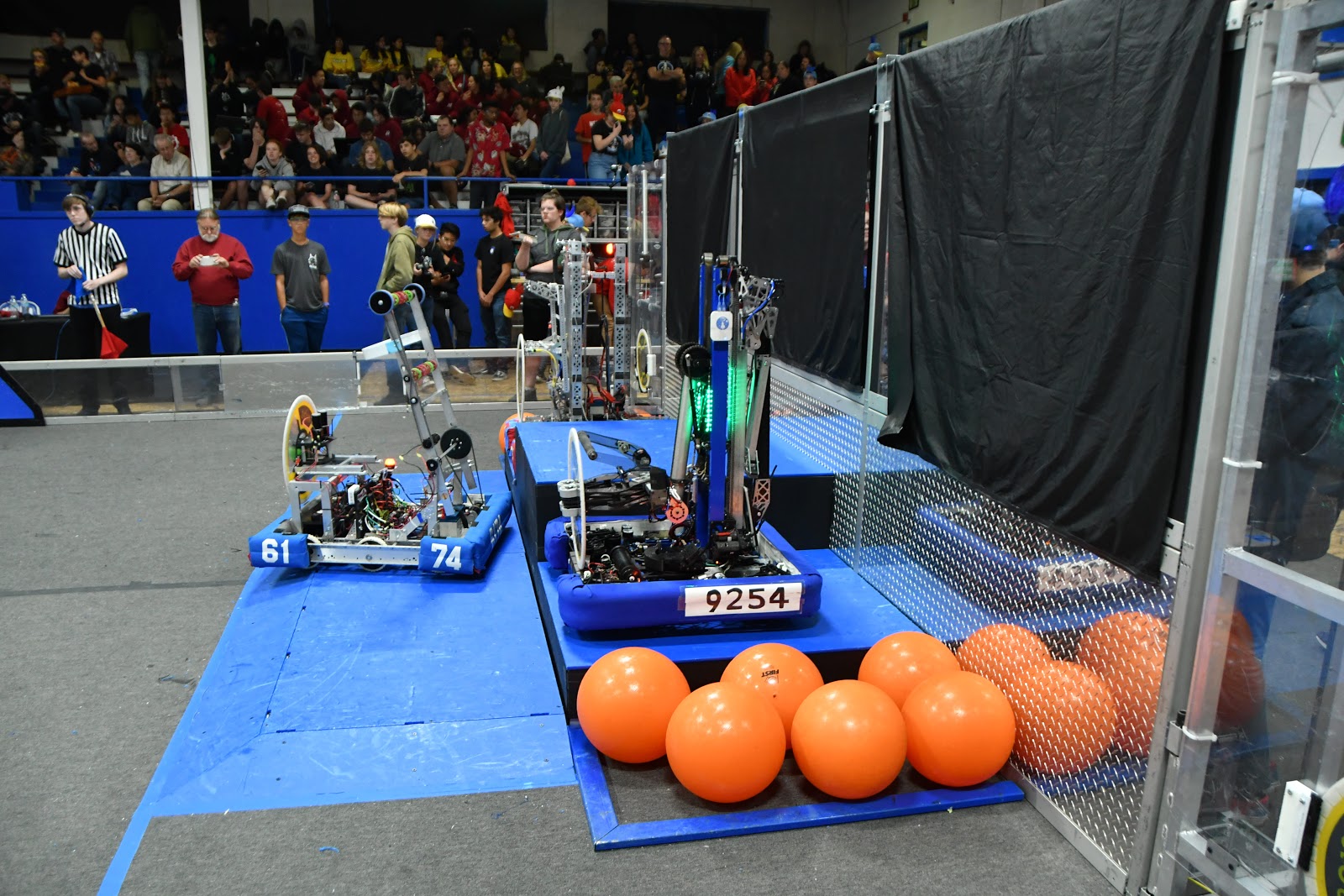
Our swerve bot on the HAB zone before an upcoming match
With our swerve bot, we had no vision which made alignment quite difficult. Due to our alignment issues, hatch panel placement was harder to accomplish. Instead, we tried to focus more on scoring cargo, in all levels of the rocket and in the cargo ship. However, hatches on level one of the rocket and on the cargo ship were easier to score because we had our camera. We also placed hatches on level one of the rocket to open scoring locations. Then, we scored cargo in on level one of the rocket as well. Our swerve bot also was able to climb onto level three of the HAV with the suction cup climber, so we used that to get us the climb bonus during matches.
Alliance Selection (Swerve Bot)
Going into the elimination period, we formed an alliance with Team 1662 Raptor-Force Engineering, Team 5104 BreakerBots, and Team 2135 Presentation Invasion.

Team 254 representative, Emiliano Hansen, poses with our chosen alliance partners
A Special Thanks
At Madtown, we would not have been able to be so successful without the amazing teams that we were able to work with during our matches. Also a special shout out to our pit crew and drive team for properly maintaining our robot during the tournament. We would also like to highlight the efforts of our alliance readiness crew to keep our alliance partners ready throughout the tournament. Team 254 would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, teachers, and parents who supported us and helped us succeed in this tournament. Special shoutout to Team 1323 MadTown Robotics for making this event possible.

The Team 254 pit crew in action

254 member, Safwaan Khan, in action as a pit crew member
