
Build Blog Day 7 (1/17/2018)
Drivebase
Task: Cartoon CAD
-
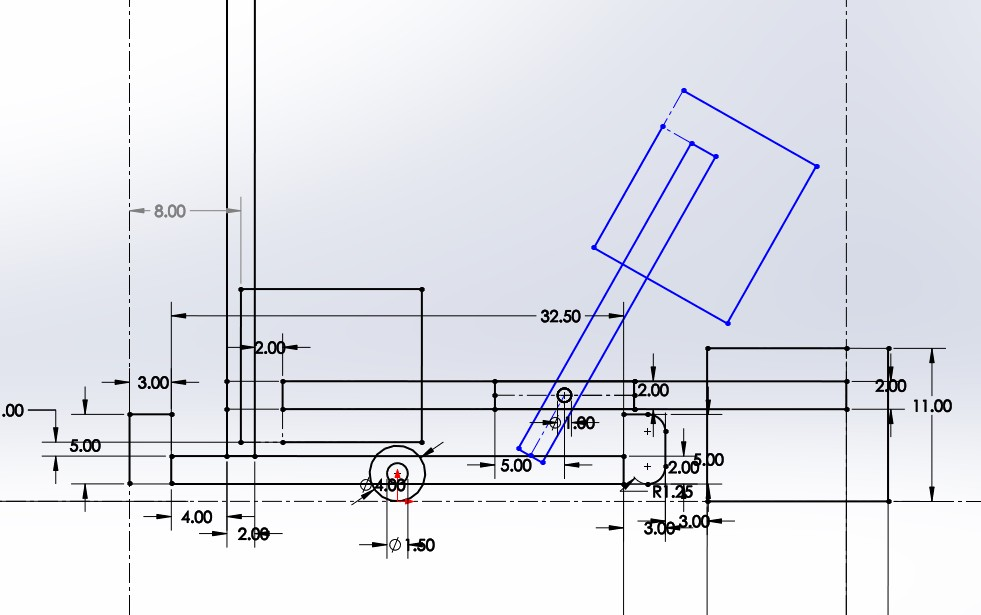
Prior to today, we had the idea of having an intake feed into a tunnel. The tunnel would serve as a conveyor system to transport the cube back and forth across the robot. However, the issues with the tunnel are that a) it will be very bulky and would serve as a huge cantilevered load on the elevator and b) the vertical translation of a cube from the ground to the tunnel (~4.75") would be hard. To solve these issues, we had a new idea where we could have an intake that would pivot 180 degrees to pick up a cube in the front of the robot and then fold back to spit it out on the back side. Since the intake is now taking in and spitting out the cube, there is no need for a vertical translation of the cube and no need for a series of rollers to convey the cube back and forth across the tunnel we need to continue investigating the geometry of this new intake design and make a decision if we want to pursue this design or not by this weekend.
Bumpers
Task: Design a way of attaching the bumper to the drive frame rails
-
We have been working on using latch pieces to latch the bumpers onto the bumper rails. During our next build, we will decide if this is the best way to go and finalize the bumper mounts on the drive frame rails.
Intake
Task: Complete designing the new intake prototype
-
With our new intake prototype design, the intake is mounted on an arm and grips the cube. The arm that the intake is attached to has the ability to rotate back 180 degrees. We plan to have the arm and the intake system itself mounted onto the elevator. When the elevator moves up, the intake arm rotate back and ejects the cube onto the scale or switch. A few issues we are facing and trying to solve, are that we don’t want the intake to be too heavy and we want the intake to have a better grip on the cube.
