
Build Blog Days 12 and 13 (1/26/18 & 1/27/18)
Elevator
Task: Design Elevator Cartoon CAD
-
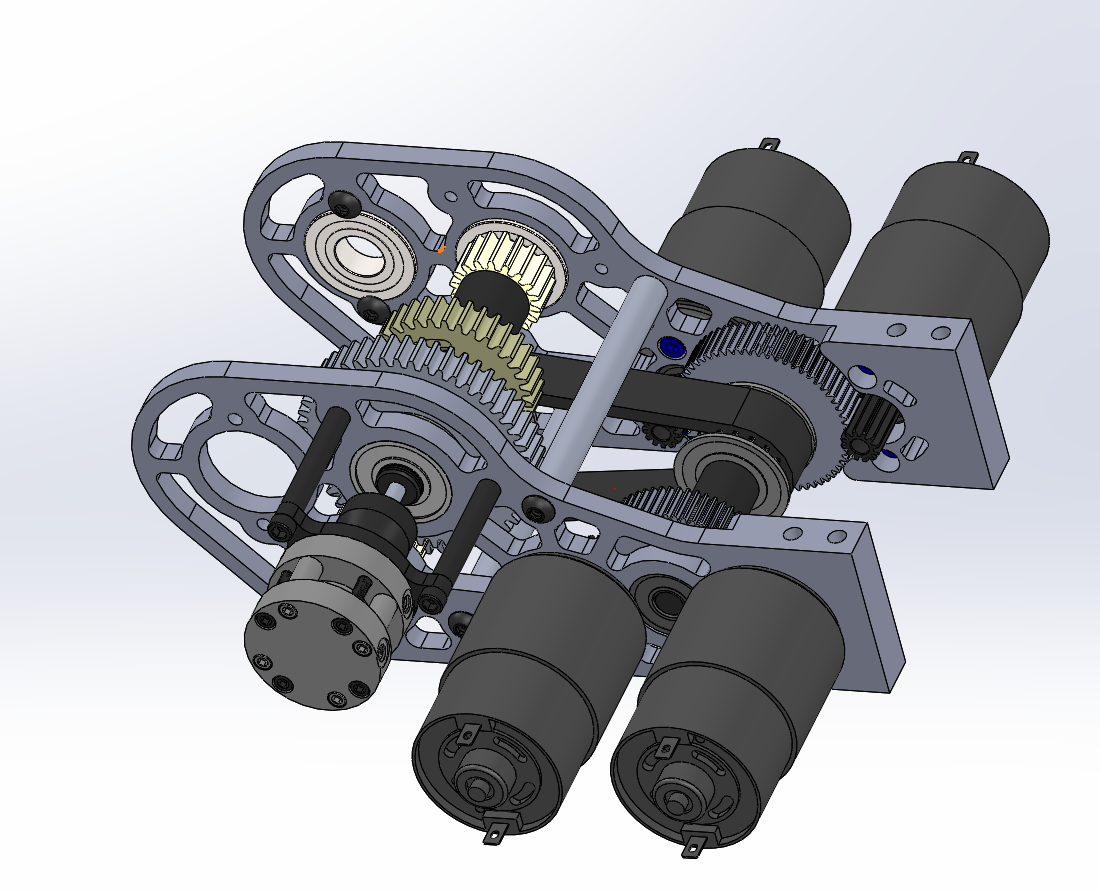
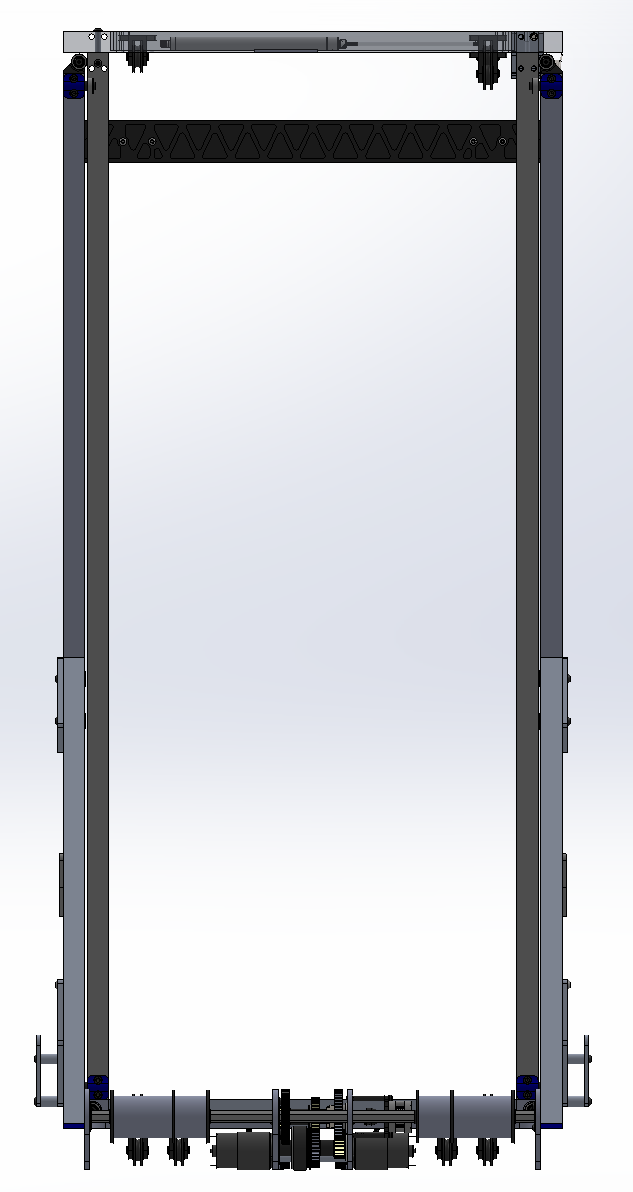
We finalized the elevator gearbox and pulley placement. To ensure the gearbox does not get in the way of the carriage, we decided to stow it below the elevator and belt out to reductions and the spool. We will have two spools, one on each side. Each spool will be divided into two sections by a flange: one section for the pull up cable and one section for the pull down cable. To avoid the carriage sweeping through in front of the elevator, we decided to have our cable runs go on the back of the elevator then come below the horseshoe and back onto the spool. We extended the horseshoe onto the frame perimeter to give us space to bolt the pulley assemblies and also to bolt into the frame rail to provide overall structure to the elevator assembly.

Rollercoaster Wheels
Task: Finish Rollercoaster Wheels Design in CAD
-
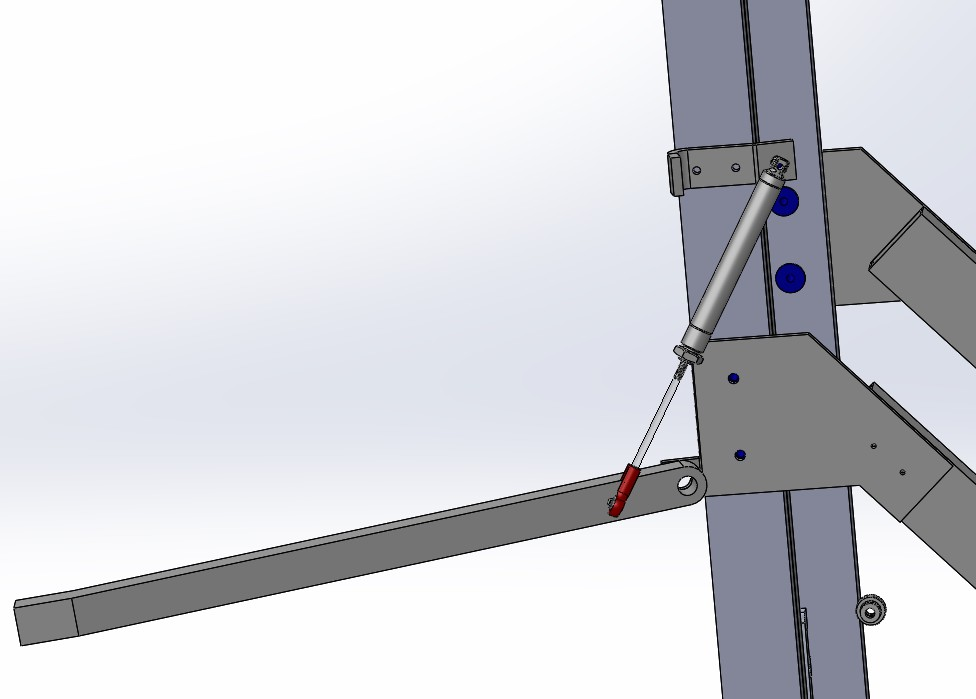
We finalized the geometry of the rollercoaster wheels design. We determined that we should have the piston mount to a plate mounted off the upright. This eliminates the original need for two degrees of freedom with two rod ends. Our plan is to start detailing the parts, finalizing that everything packages, and doing stress analysis.
Electrical
Task: Wire the Practice, Programming, and Competition Robots
-
For wiring, we worked on wiring the talons and distributed power to the VRM, PCMs, and RoboRio. We completed wiring the programming bot and are close to finishing wiring the practice bot.
Programming
Task: RPLIDAR Driver
-
We worked some more on the lidar driver. We discovered a few problems with the UDP method where some data would be lost when the information was sent to the roborio resulting in a few of the packets missing timestamps. To solve this problem we ended up writing to an input stream and using a buffered reader to transfer the data instead. The new method also reduces CPU usage and decreases latency, so it is pretty much better all around.
