Build Blog Days 28 and 29 (2/23/18 & 2/24/18)
Programming
- On Friday, 2/23, we handed off practice bot to the programmers to begin working on autonomous code. The programmers rewrote a large portion of our code to greatly simplify all our state machines and change the way operator controls work. They separated operator controls into wrist angle presets and height presets and experimented using an xbox controller rather than the button board. They also began working on some autonomous actions for intaking, setting superstructure position, and shooting/placing cubes.
Driver Tryouts
- We had our first round of driver tryouts, where all 254 members interested in joining drive team participated in a written test. The purpose of the written test was to test one’s knowledge of the Game Rules and Drive Team Positions during a match. A few lucky students were chosen to move on to the second level of drive tryouts where they were able to drive Misfire, our robot from last year. Students were asked to pick up gears from the field and place them on a makeshift peg, using the controls on our driver station. After these two rounds of tryouts, we narrowed our choices for students on the drive team, and will finalize our choices over the course of this week.
Driver Practice
- To facilitate driver practice this weekend, we rigged up the wooden lever arm of the scale we got from the SJSU kickoff onto the aluminum scale we are currently constructing. Our driveteam also practiced with Team 973 and Team 5499 throughout the day.
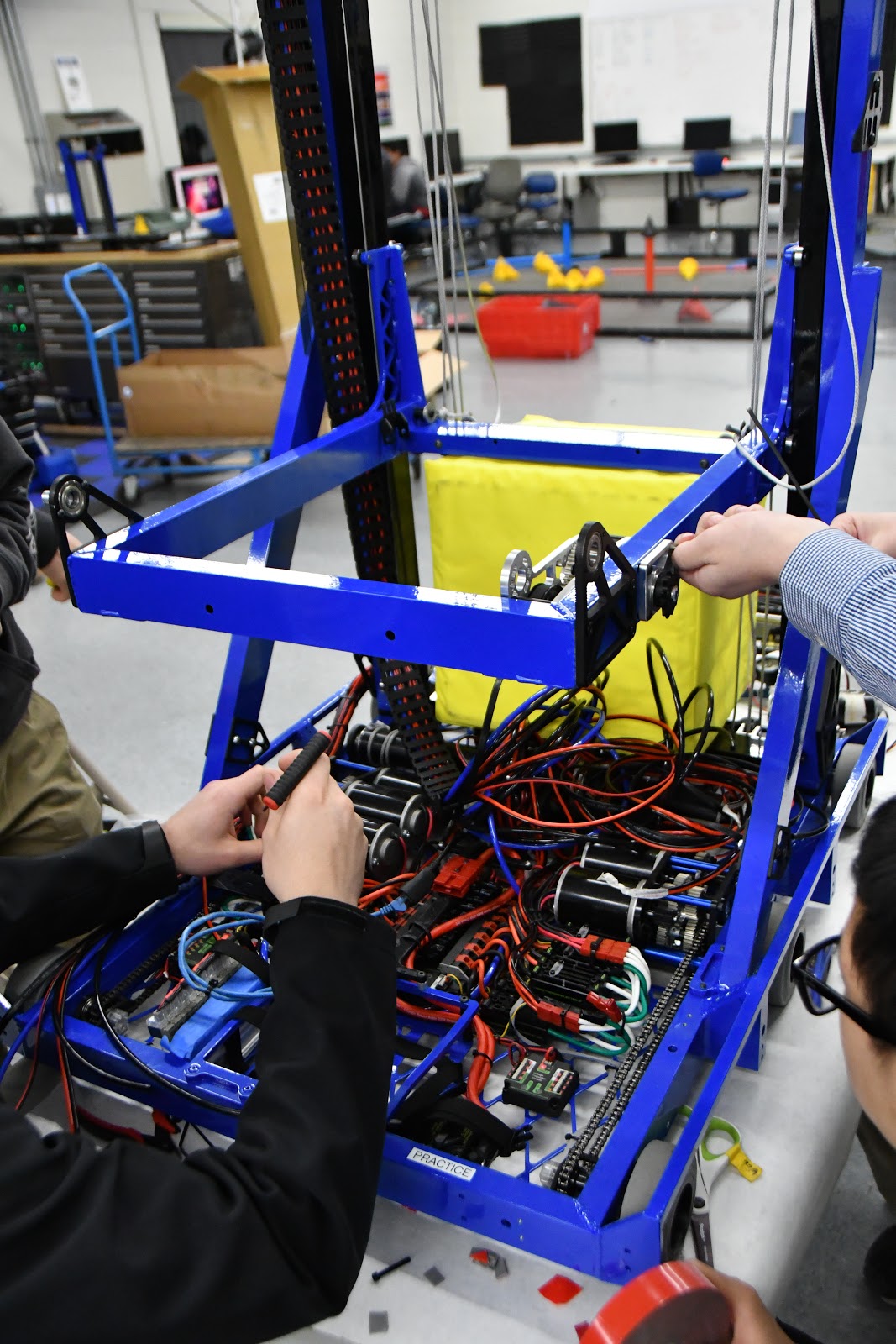
Working on Programming Bot
- On Saturday, 2/24, we worked on getting programming bot to the same state as competition bot. This year, driving is an especially critical component of the game. Because our robot accelerates extremely quickly with the 6 MiniCIM drivetrain and has a high CG with the elevator, the driver needs to have confident control over the robot's motion to ensure it doesn't tip over and the operator needs to have confident control over the robot's operations to ensure our mechanisms are stowed unless needed and do not accidentally hit parts of the field.