
Day #13: Manufacturing and Continued Prototyping
We had an excellent turnout of students today, which helped get a lot done.
Manufacturing
Chassis
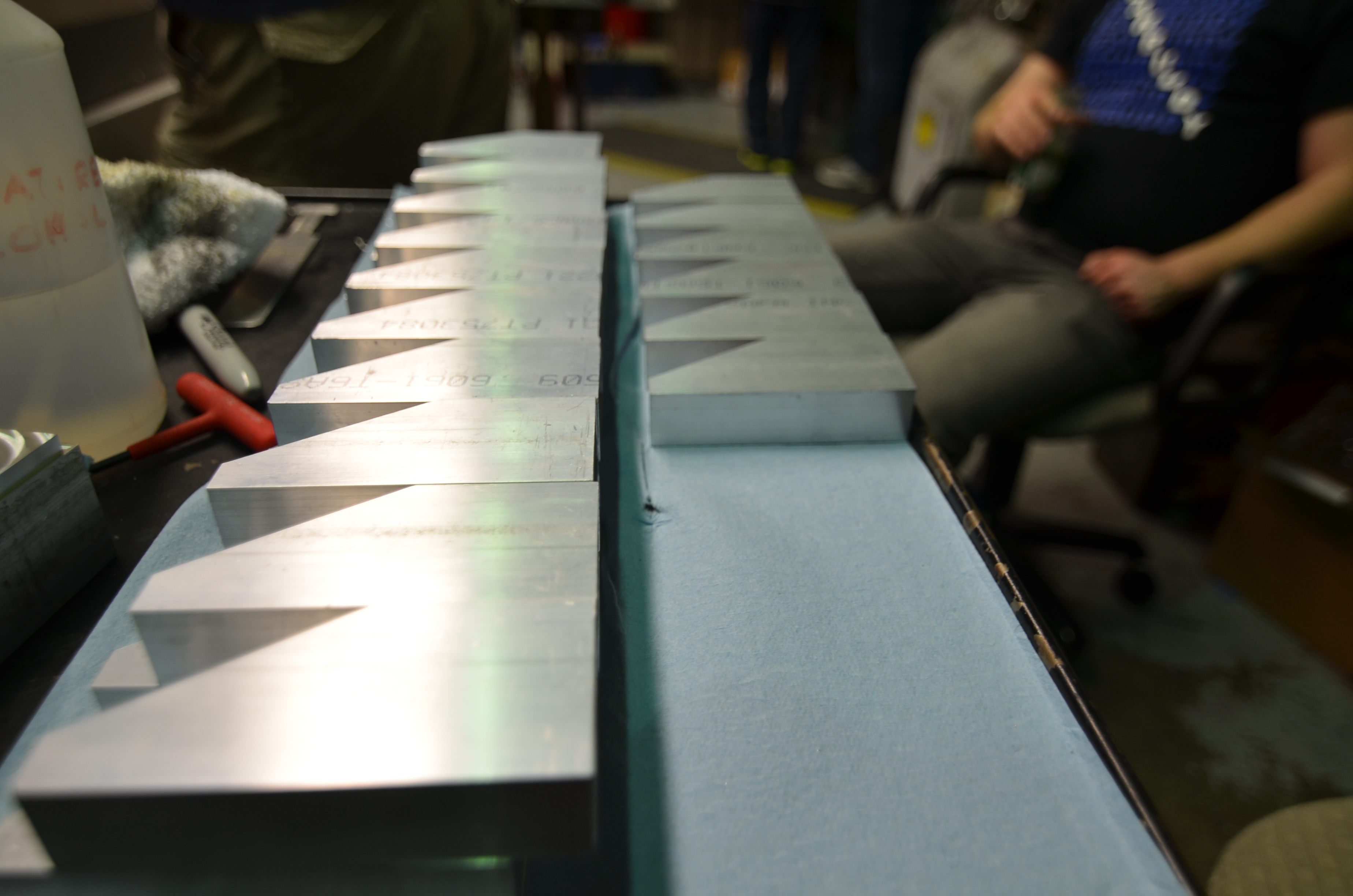
The chassis needs to be completed by Monday to be sent out for welding. There are a few more parts that need to be completed for the chassis. Students worked on completing the covers for the bumper mounts. These parts were manufactured on the manual mill. They also finished the parts for the battery box (which is part of the chassis weldment).

Students cutting the battery box plates to length
On the CNC, the bumper mounts were being completed. These parts are a little more complex and take some time. They have been in progess for the past two days.
Bumper mounts in progress

Many completed parts so far, all very well organized
Prototyping
Shooter
There are a few changes that need to be made on the shooter prototype, none of which were completed last night. The biggest change is going to be the increase in speed for the front wheels. The previous wheels were geared 2.3:1 making them spin at approximately 10,000 rpm. The wheels were changed to a smaller radius and a new mounting plate for the motors is in progress. This mounting plate will accomodate a BAG motor which spins at 14,000 rpm (free speed). It will be geared up a little to spin at 17,000 rpm. When accounting for efficiency and load losses, it will spin at approximately 15,000 rpm, which is the desired goal.
The shooter will also be turned upside down (little progress was made on this yesterday) to test if it is possible to load the frisbees upside down.

Students working on the shooter prototype
Intake
A new intake was designed today, to match the concept intake that is currently in the CAD model. This intake has a new funneling method by implementation. By concept, it is the same (where one frisbee goes in faster than the others). Previously, there were perpendicular belts that moved a frisbee ahead of the other one to allow the intake to funnel from two frisbees to one. On this current intake, the horizontal belts were replaced with four rollers. These rollers were shaped in a funnel as well. It was decided that the two frisbee wide intake will not be used. At any point in the match, there will not be two frisbees that will go in at exactly the same time, so the intake does not need to be two frisbees wide. During autonomous, the robot will drive towards the frisbees diagonally to intake them, rather than go straight on.
Students made an intake with these four rollers that replicated the "drop-down" motion that will be needed when the intake goes from "stowed" to "engaged." There is still a lot of work to be done. The structure was completed, the rollers were mounted, and the pivots worked. Its a matter of improving the concept to see what works and what doesn't.
Programming
Sensors and Wiring
Students did a lot of testing with sensors today. They wired in different sensors to check if they still worked. One of the most significant progresses they made today was with the use of the banner sensor. As you can see below, they used the banner sensor to detect whether the frisbee is upside down or right side up. This will come in very useful for this year's shooter, as shooting upside-down frisbees is slightly different than shooting right-side-up frisbees in terms of their trajectory and necessary velocity.
The two pictures below demonstrate their progress. In the picture to the left, the frisbee is upside down. However, the little orange light to the left of the green light on the banner sensor (yellow box held by hand) is off. In the picture to the right, the little orange light is on, which means the frisbee is right side up. In the off position, the sensor value returns false; in the on position, the sensor returns true. Since this banner sensor can detect only two states (frisbee upside down or no frisbee, and frisbee right side up), the team is looking into either using two banner sensors or one analog sensor that can help detect three states.
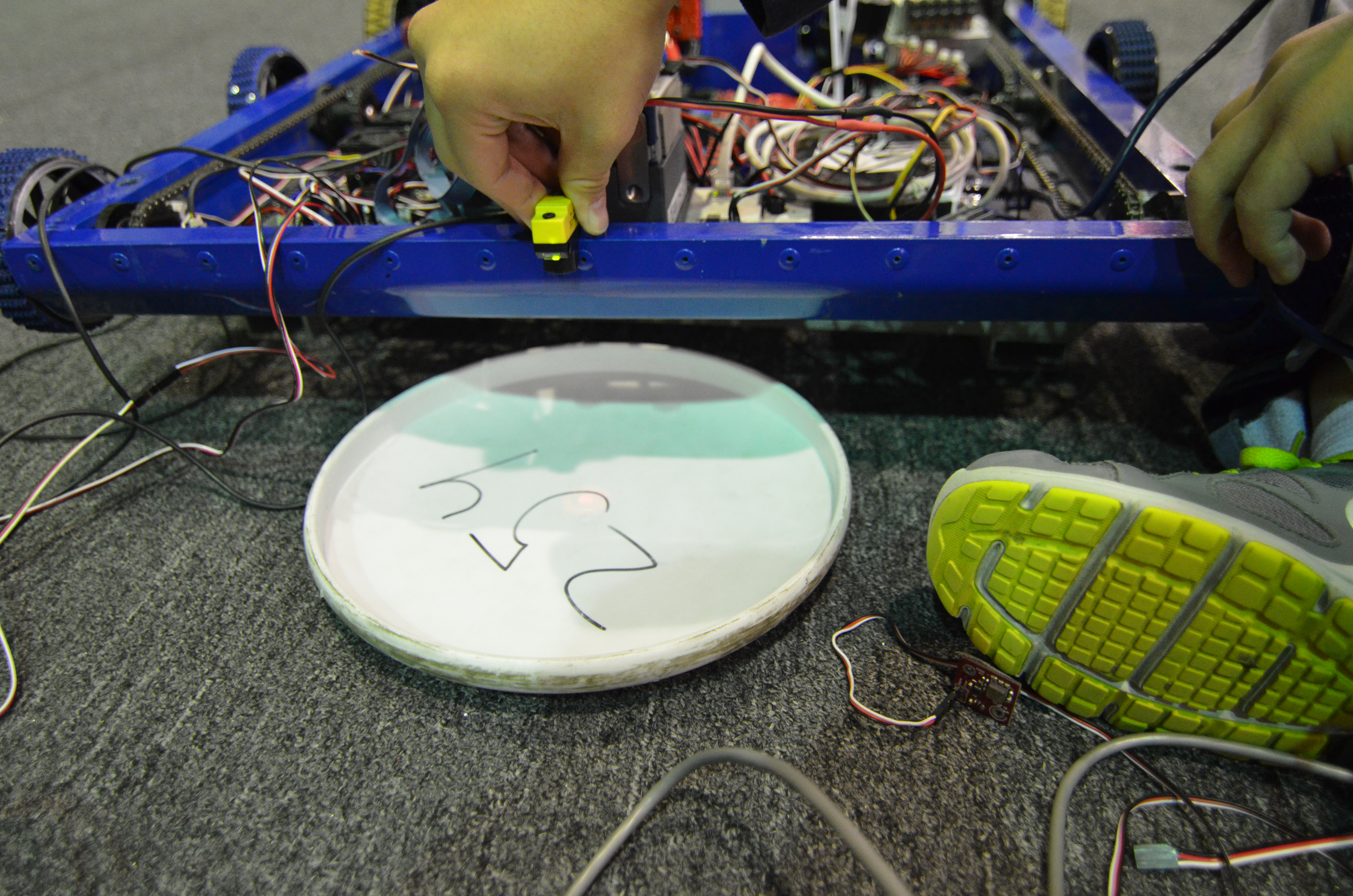
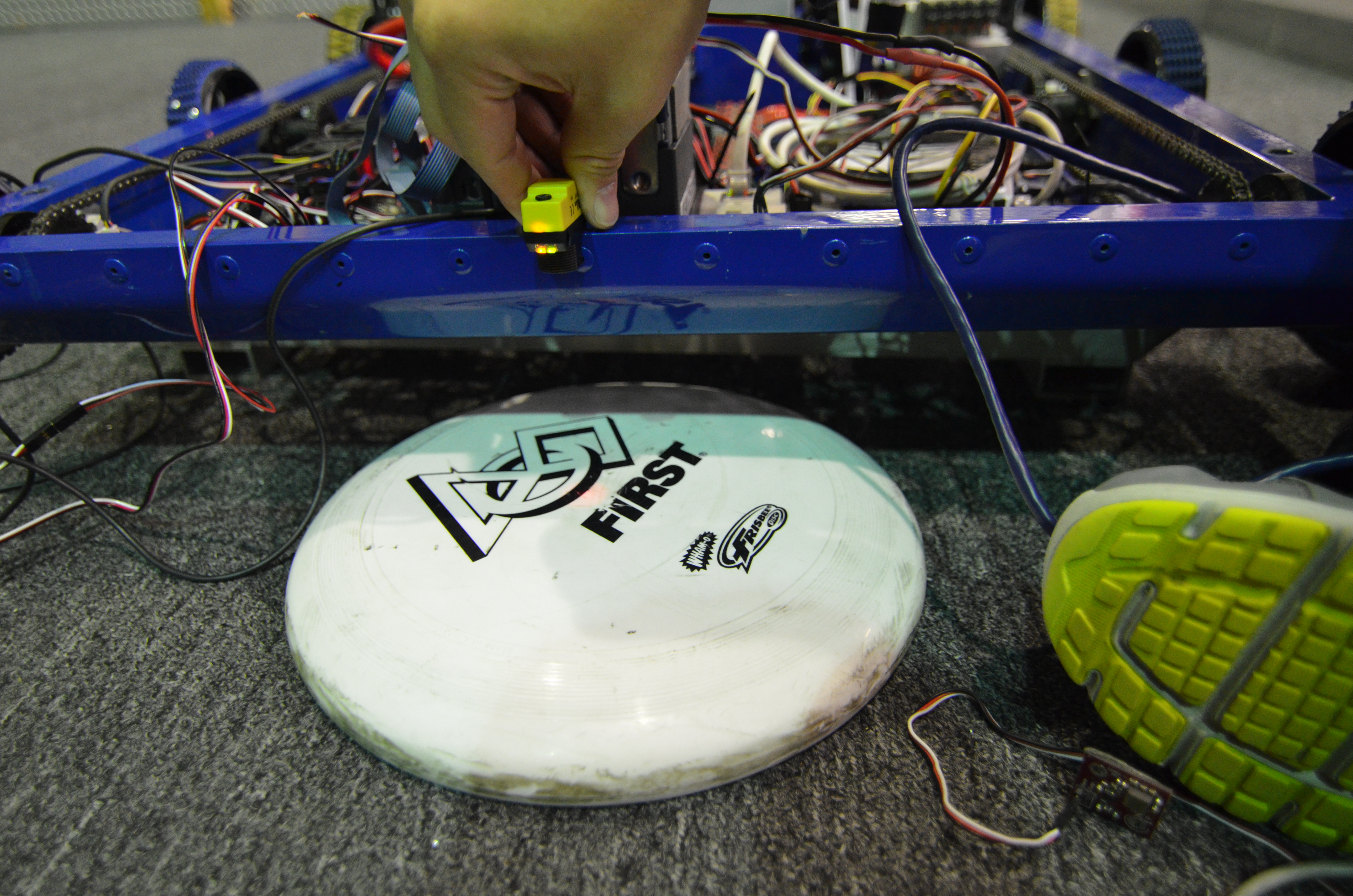
Upside-down frisbee (left)
right-side-up frisbee (right)
In addition to banner sensors, the programmers tested two gyros, both of which worked well. Next, the team wanted to test S5 encoders, but the wire to connnect this encoder to the digital sidecar needs to be soldered or modified. The S4 encoders are the last on the to-do list, which will happen tomorrow.

Students also worked on wiring other sensors and testing them out
In other news, students finally got the Smart Dashboard constants extension working on the driver station laptop. This would allow the team to upload new constants' values to the robot via FTP in a text file, so that re-compiling or re-deployment would not be necessary to change one little value. The team originally had issues with the FTP connection from the driver station laptop to the robot (specifically, a socket write error), but the programmers discovered that completely disabling the firewall did the job.
While the programmers have a working system to send text files to the robot, a method of reading constants and values from the text file and updating them is still required. The code to do so has been completed today after successfully rewriting the String class' split method. Though the system seems to work on the students' laptops, the next step for this is to actually test it on the robot and confirm that the hard-coded constants are actually being updated.
Miscellaneous
Other students worked on organizing the tool chest, which turned out to be very helpful. They took the tools out and laid them neatly back in the chest.

An organized and happy tool chest
Action Items for Tomorrow
-
Continue working on shooter
-
Finish prototyping intake
-
Finish manufacturing parts for chassis (especially frame rails)
-
Continue work on robot design
-
Finish bumper CAD
-
Continue design for control board
-
Test constants parsing/updating on the robot
Closing time for the lab was 2:00 AM
