
Day #17: Chassis Arrives & Prototyping Continues
Prototyping
Intake
Students began building a new prototype intake. With four small, vertical, rollers and one large horizontal roller, the intake should work well once complete.
Working on the latest intake prototype
2010 Robot
Students continued constructing a simple bumper onto the 2010 robot, Onslaught. Once complete, the new prototype intake will be attached to the bumper and tested for performance. Also, once the 2010 robot is operational, our driveteam can begin practicing. Currently, the left side bumper is placed on completely, but the wooden block on the right side is too short. Students will fix the right side bumper as soon as possible tomorrow.
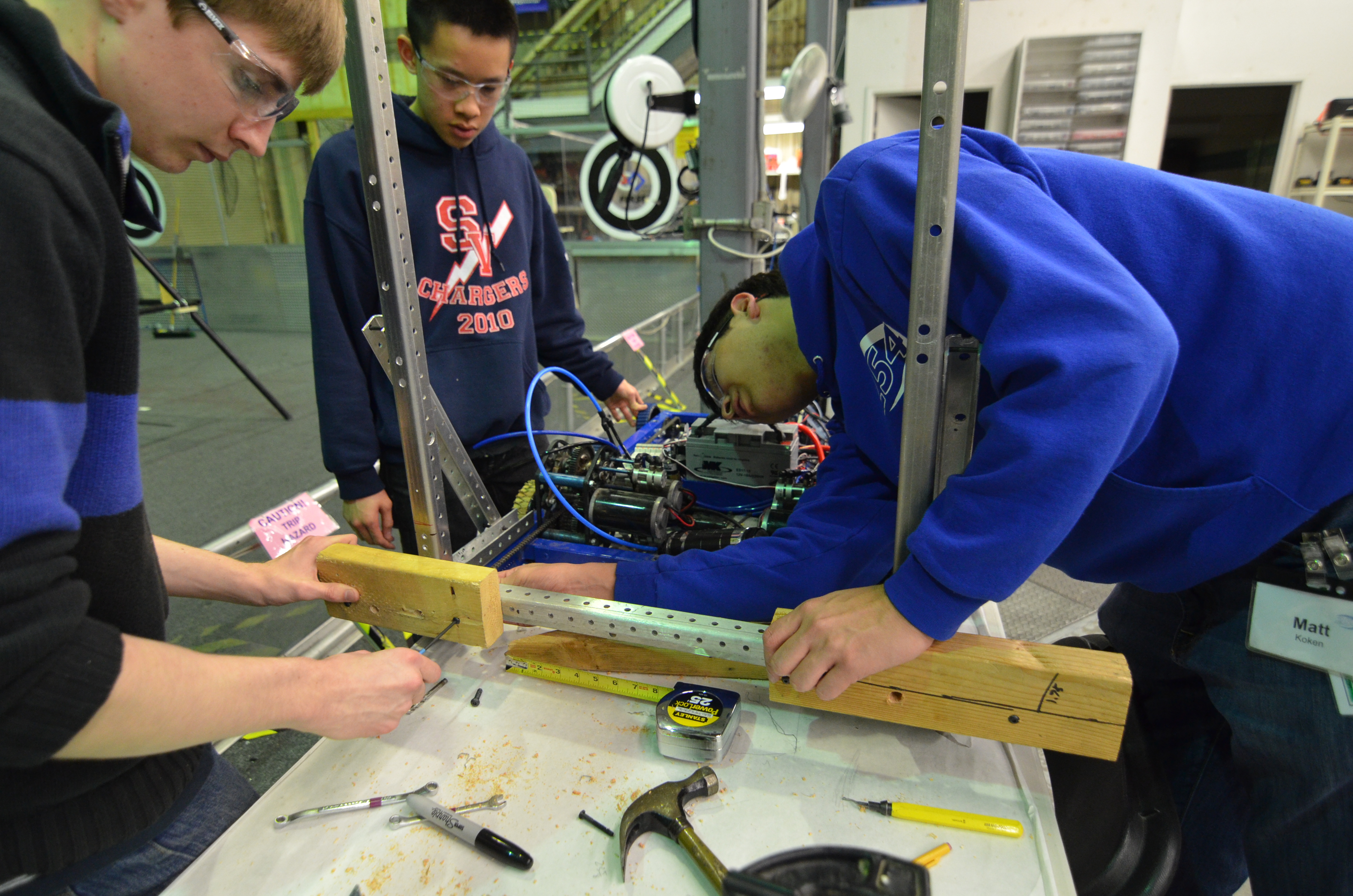
Attaching wooden “bumpers” onto the 2010 robot
Manufacturing
Today, the team recieved the drivebase chassis back from S&S Welding after sending them out on Monday. Students brushed the drivebase chassis in order to get them ready to be power coated. They will be sent to Pacific Coast to be powder coated tomorrow. The team expects to get them back by Friday.

Scotch-briting the drivebase chassis
Students also used the lathe to machine spacers for gearboxes. These should be finished tonight or tomorrow morning. Once the plates and shafts are complete, the team will begin to assemble them.
Programming
The programmers continued to work on translating state space and matrix code from 2012’s C++ code to Java. Currently, they are trying to implement a function that multiplies two matrices together.
Meanwhile, the latest cRIO image (v47) was successfully flashed to the 2012 robot today. However, the students need to re-deploy the code onto the robot, as the code was erased in the process of re-imaging.
Action Items
- Continue machining the shafts and plates for the gearboxes
- Continue testing the 2010 robot and let drivers practice
- Continue designing the shooter, climbing mechanism, and intake
