
Day #21: Prototyping & Wiring
Prototyping
Indexing
The intake prototype is taking shape. It is now at a point where it's working and we are almost ready to begin manufacturing. Along with the intake, the mechanism for transferring frisbees to the shooter is also in the process of being prototyped. This indexing mechanism will transfer frisbees from the intake and conveyor to load them up in the shooter. The prototype will use two pneumatic pistons to accomplish this. It doesn't yet work fully, but in terms of a proof of concept, in works fairly well.
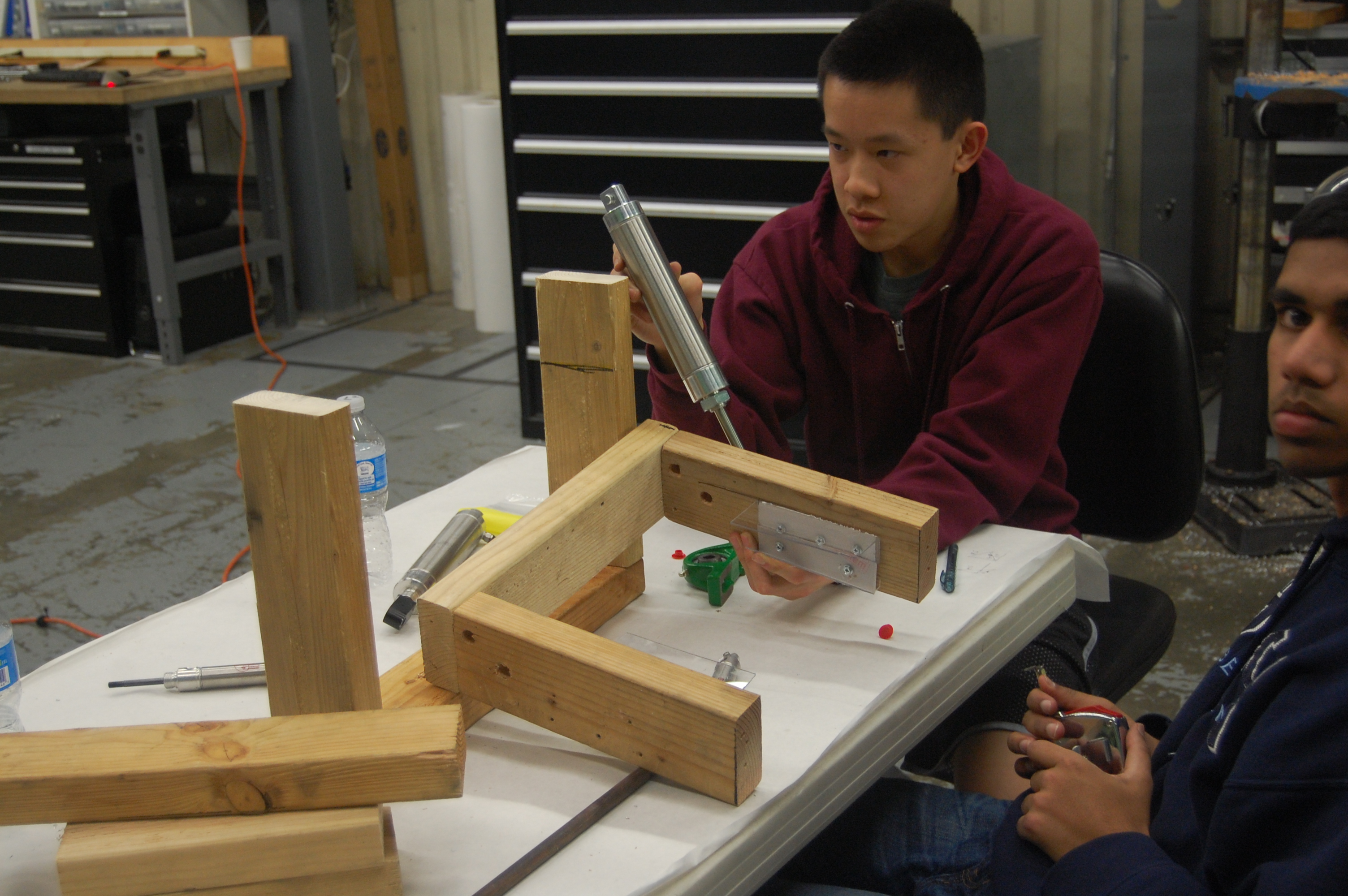
Students building the indexing prototype
Wiring
The robot wiring was worked on today on both the practice bot and the competeition bot. The PWM cables from the Talons were wired and put in place and the relays were wired to the power distribution board.
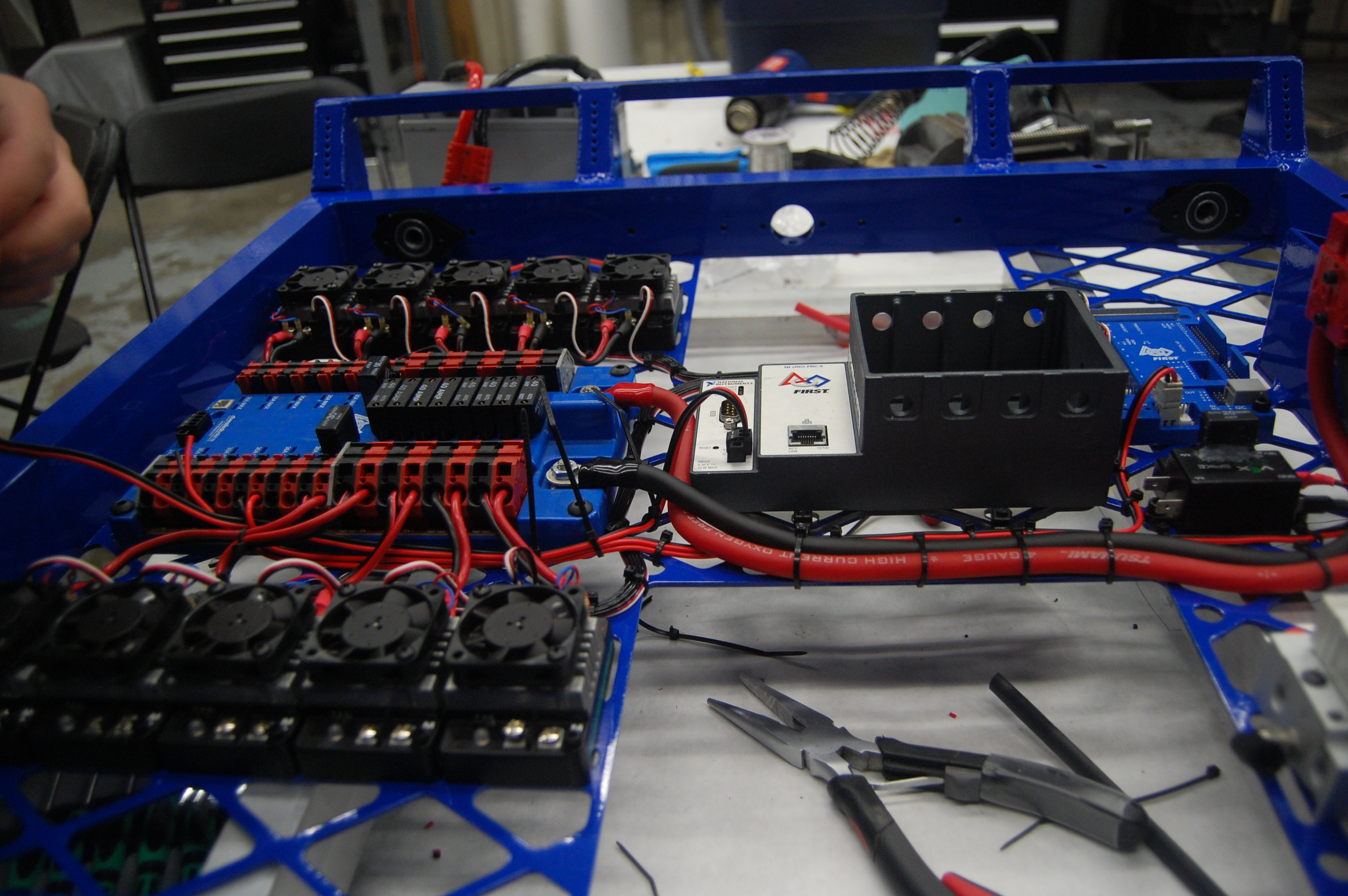
Wiring on the drive chassis
Programming
The programmers did more work on control and filters. They created a "bang-bang" controller; unlike the PID contoller, the bang-bang controller runs the control source until it reaches it goal, and stops once the goal is reached. They used the control scheme to control the shooter wheel, which worked fairly well (aside from the funny noises of the motors going on and off). The students also used a Counter instead of an Encoder to represent the encoder sensor, as the period of the encoder can be retrieved to calculate the RPM of the shooter wheel. Next, they also wrote a moving average filter, which takes in a double as an input and stores it in an array. The filter would return the average of the inputs as a single output. This has not yet been used, but it is a good utility to have.
Finally, the programmers prettified the code significantly. Many Javadoc comments and style-guide-cohering formatting fixes were included in the prettification process.
Action Items
-
Finish and test indexing prototype
Lab closing time for the night was 10:00 PM
