
Day 44: Scrimmage Wrap-Up
by Vidur Maheshwari ’17 and Joey Rodoni ’16
Scrimmage Complete
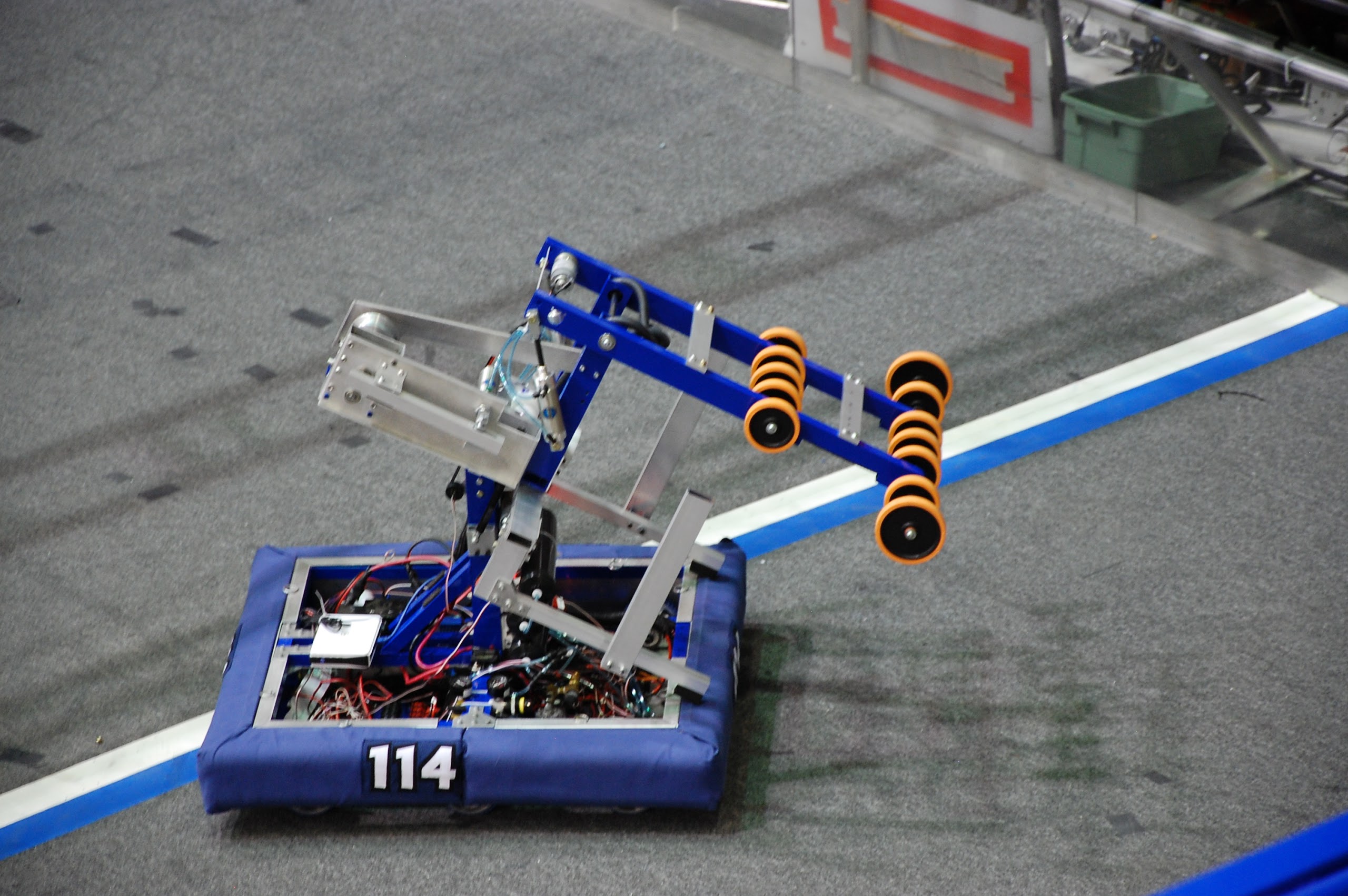
Today was the second and final day of the scrimmage. The team had a lot of fun working with and helping other teams. 254 saw some interesting designs and robots over the past weekend.



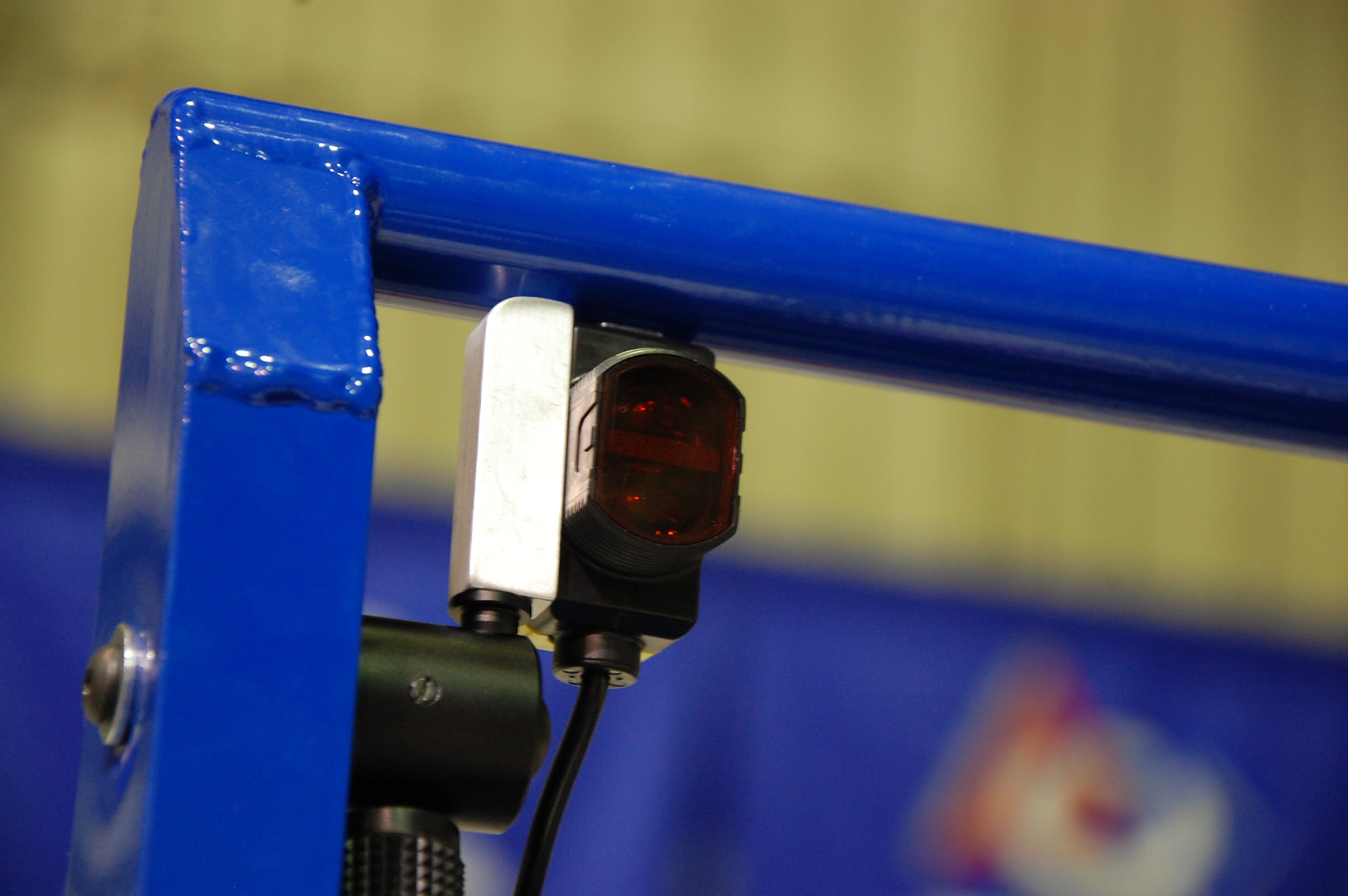
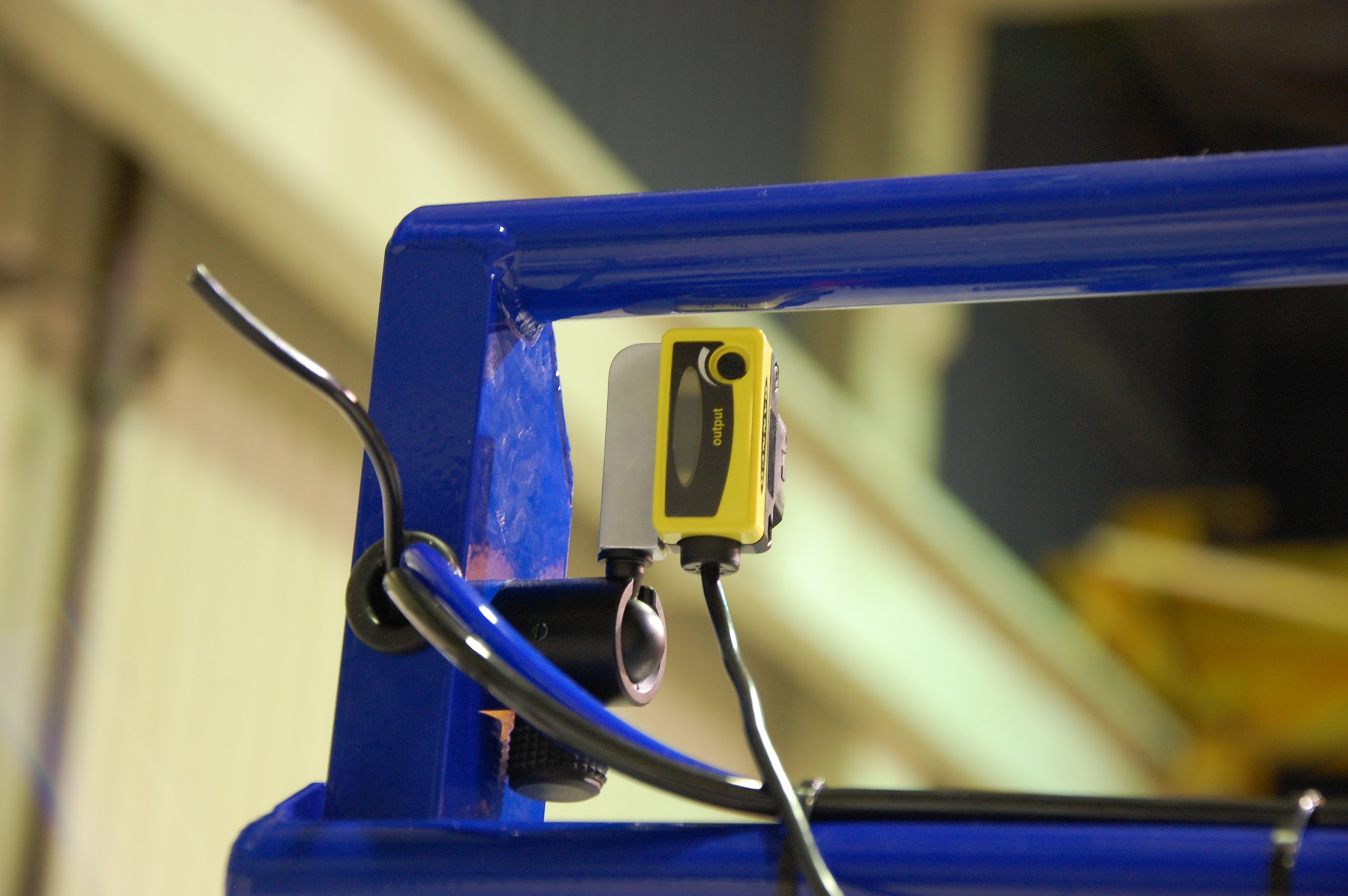
Hot Goal Sensors
Today students mounted the sensors that will check if a goal is hot during autonomous. Using these sensors the team will be able to score more points in autonomous mode. The sensor will locate the hot goal reflective tape with infrared lights and detectors.
Bumpers
Today the team finished both blue bumpers. The frame for the red bumper has been constructed.
Hot Goals
Today students mounted both hot goal indicators for the blue goal during the scrimmage.
Rear Intake
Finally, today the team finished building the rear intake by mounting the rear intake motor and adding the shield for that motor.
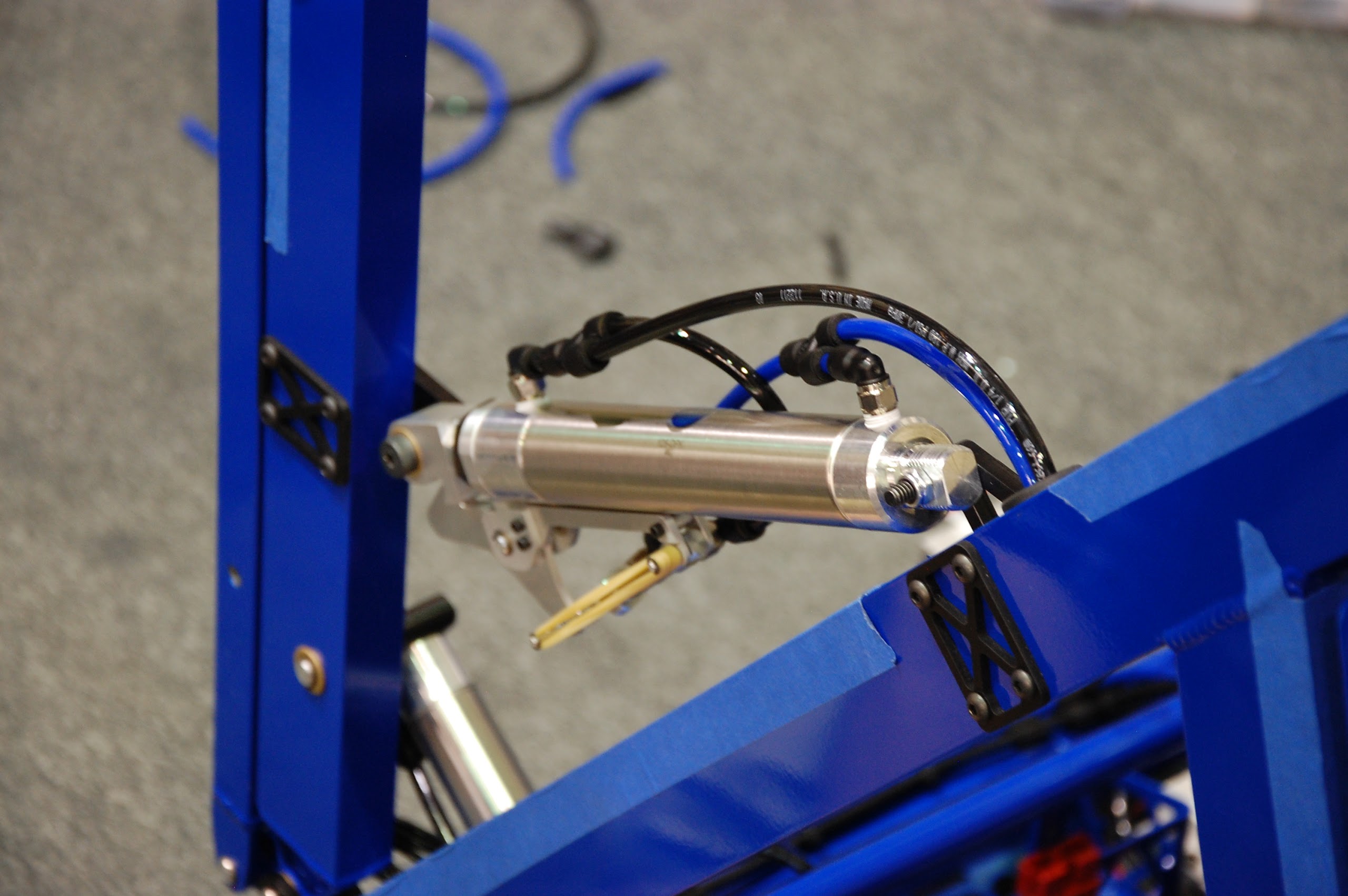
Xzibit Pistons
Today the team installed the catcher pistons on the competition robot and tested them. The pistons will open and close the catching portion of the robot. One piston on each side will move the actual frame and the other smaller piston will lock the piston in place.
Action Items
- check Trello for to-do list
- Finish the robot
- make side panels
- Finish the code
- Finish the robot pamphlet
- Make the technical binder
- Make the red bumper

The day after tomorrow the final stretch of build season begins. The team will have 48 hours to complete the robot before it must be bagged and tagged. This is a key milestone in the season.
