
Day 40: Intake and Truss
by Matt MacDonald ’17
Today, our team worked to address some problems in our intake and truss. We also worked on programming an important system in our robot.
Intake
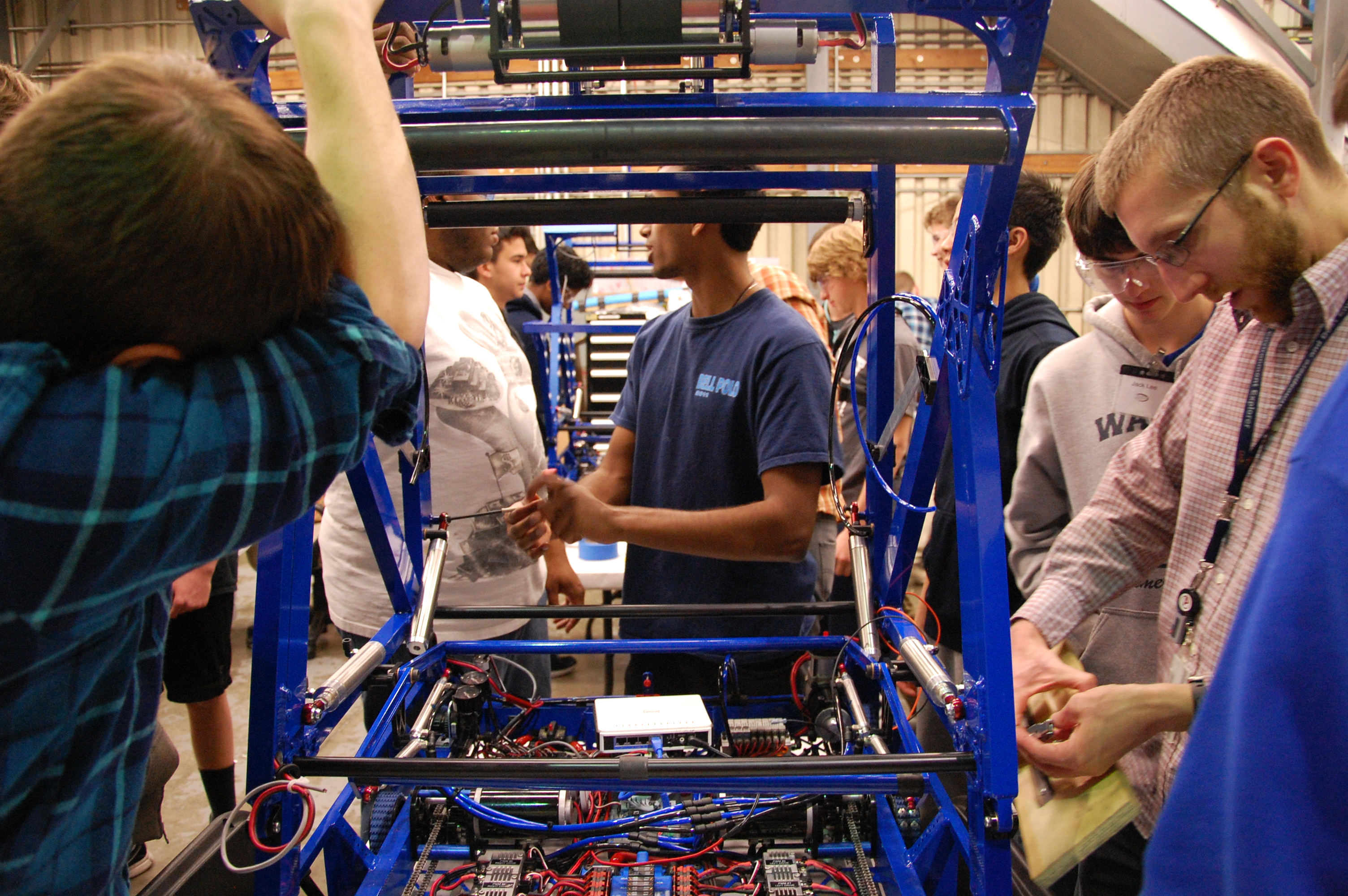
Our team worked to install and improve our intake system. First, our team changed out the bent arms in our robot and installed some gearboxes and motors. Next, we drilled grommet holes and finished up some wiring. Lastly, we used pneumatic wiring to further improve our intake system.

Some students created intake holders very important to the success of the robot.
Truss Improvements

In order to make the truss more stable and reliable students made a bar that would ensure that it would work correctly.
Programming
The robot needed a system that would allow it to quickly ready its ball to pass or shoot for a goal. The team programmed the robot so it could quickly move through several pre\-made states and shoot at a goal.
Action Items
- Assemble robot with Mani and Abhi
- Programming with Kevin and Brandon
- Finish bumpers
- Finish truss stabilizer
- Continue control testing
