
Day #2: Finished Pyramid!
Today the team got a great start as soon as we could access the lab, making substantial progress on a multitude of projects.
Prototyping
Today in prototyping the team pursued our 3 designs decided yesterday for shooting mechanisms which are:
-
Radius design
-
Continued to try and make shots using the pneumatic air wrench to
drive the flywheel
-
Used the strategy of touching the pyramid to take shots without being hit by opponent robots
-
Created a feeding device to automatically load frisbees into the shooter
-
-
Linear Design
-
CNC machined part of the belt mechanism to create a tensioned timing belt system to launch the frisbee
-
Added guide rails to create a solid static wall opposing the timing belt to create spin on the frisbee
-
Added flanges to the pulleys to help guide the timing belts
-
The pulleys are powered by a direct mounted CIM Motor running at 5300 RPM
-
Shows promising capabilities both in power and spin and is being pursued in greater depth

-

-
Arm Design
-
Completed initial prototype design
-
Mechanism is powered by a 1 stroke piston
-
Semi-effective at short range
-
Needs to be modified to increase range and spin to be able to get a better understanding of its capabilities

-

Design
The decision was made to build a modified version of the 2011 drive system which operated a 6 Wheel Drivetrain System with two speed gearboxes (high gear at 19.8fps, low gear at 7fps). Center wheels are lowered to allow for maximum maneuverability. 3.5″ wheels keep the robot center of gravity very low to the ground. Additional design improvements have been pushed to tomorrow for final decisions. The team is still in the process of brainstorming designs for both intake and climbing/hanging mechanisms.

The part drawings for the main shafts in our drivetrain are completed and ready to be sent out to sponsors. The completed drawings are for the following parts:
-
Drive Gearbox Output Shaft
-
Drive Gearbox Intermediate Shaft
-
Wheel Shaft Medium
-
Wheel Shaft Short
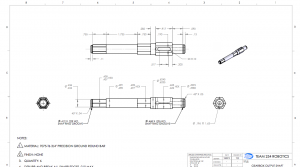
Output shaft drawing
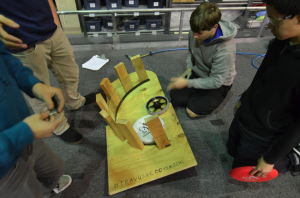
Field Construction
Students completed all components and assembly of the pyramid, creating a solid basis for hanging prototype testing.

Machining
The CNC mill was used to mill components for the linear shooter prototype and is prepared to be in around-the-clock machining as soon as the preliminary metal shipment has arrived.
Programming
The programmers began to write some code in Java to deploy to the 2012 robot. They used the CommandBasedRobot structure for the code, and fixed all previous errors that popped up before during deployment. The code was deployed and ran successfully. Currently, the team has a completed drive subsystem and a couple drive commands. In addition, some students worked on a system to read values from a file for on-the-go constants editing.
Lab closing time for the night was at 1:00am
