
Day 4: Prototypes, Coding, Drive base design
Catcher Prototype
Today, we continued work on the catcher prototype, making it higher and wider so that it can better catch balls from all angles. Although the catcher is promising, its large size may be a problem when packaging mechanisms for the robot.
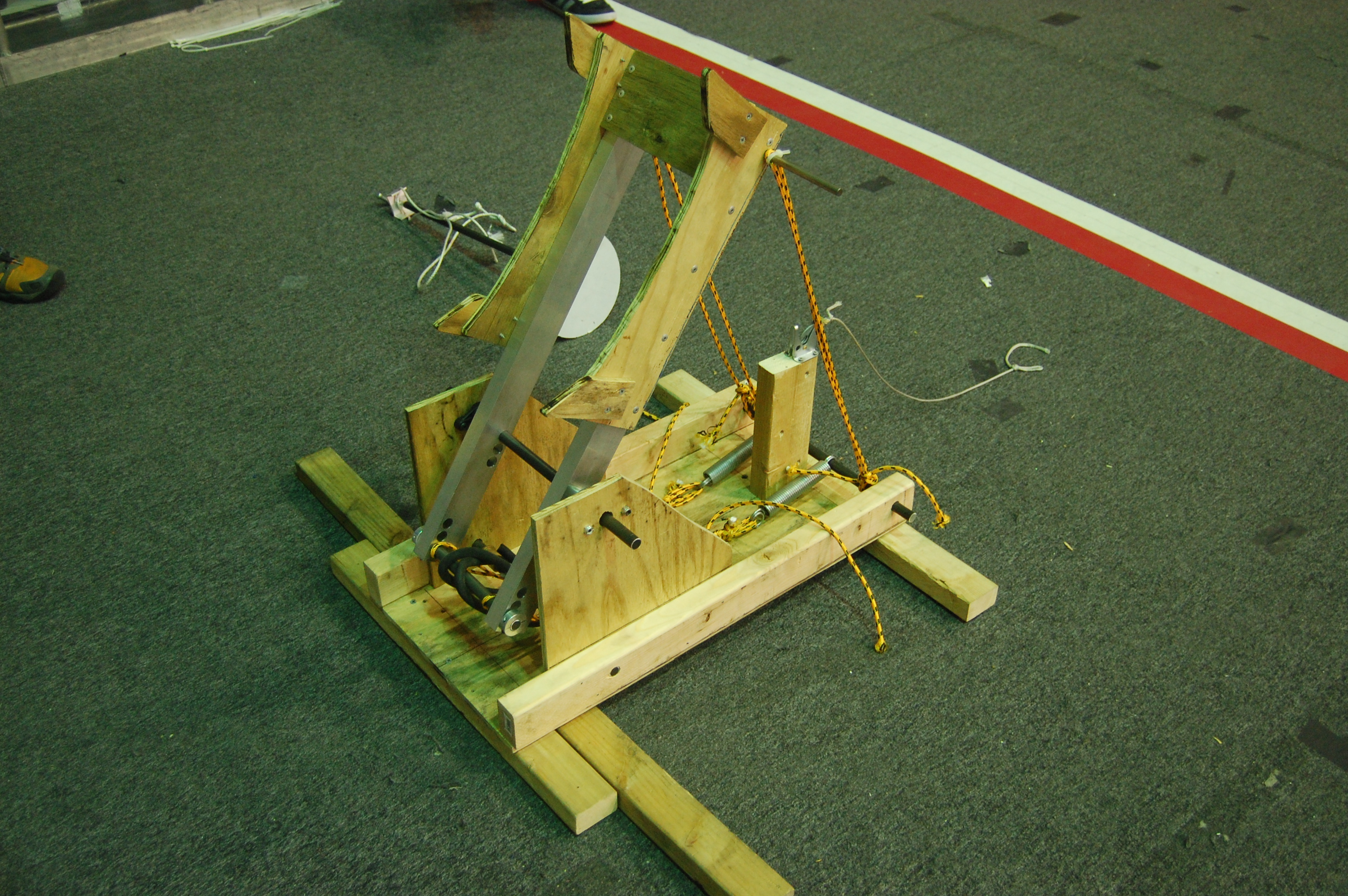
Catapult Prototype
The catapult prototype was finished today. The shooter is very smooth and can be easily reloaded in less than 5 seconds. It is consistent and accurate from up close (~2 ft from high goal) but mediocre from midway to the white zone. This shooter suffers from inconsistency in ball positioning within the catapult which could be improved with a better ball cradle.
Flywheel Shooter Prototype
The flywheel shooter has been the most successful thus far with accuracy, precision, range, and simplicity. Because of its success (especially in scoring all 3 balls in under 5 seconds), we took it apart to replace the large wheels with smaller wheels while narrowing it to maintain ball compression with the smaller wheels. We hope to test this tomorrow.
Programming
Today, the programming team worked to get the 2013 practice robot up and running to test the drivebase. Several problems were encountered along the way. First, they had an SDK error on the robot which took them a long time to fix – eventually a cRio reflash solved the problem. Second, there was a problem with the wiring on the robot so they weren’t receiving any data from the TCP server. They eventually fixed the problem and now they are working on a way to graph the data from the robot in a quick and easily readable way.
Over the next few days they will also work on are prototyping some autonomous for the robot as we determined the autonomous is very important strategically.

Autonomous Strategy
We have determined that the autonomous period is critical to our success in Aerial Assist, allowing the robot to score up to 65 points. Because of this, we want our robot to be able to score 3 balls in under 5 seconds. The flywheel prototype is the most promising for meeting this objective.
Over the next few days, the programming team plans to start working on drivebase control loops for autonomous, using Overkill as a practice base.
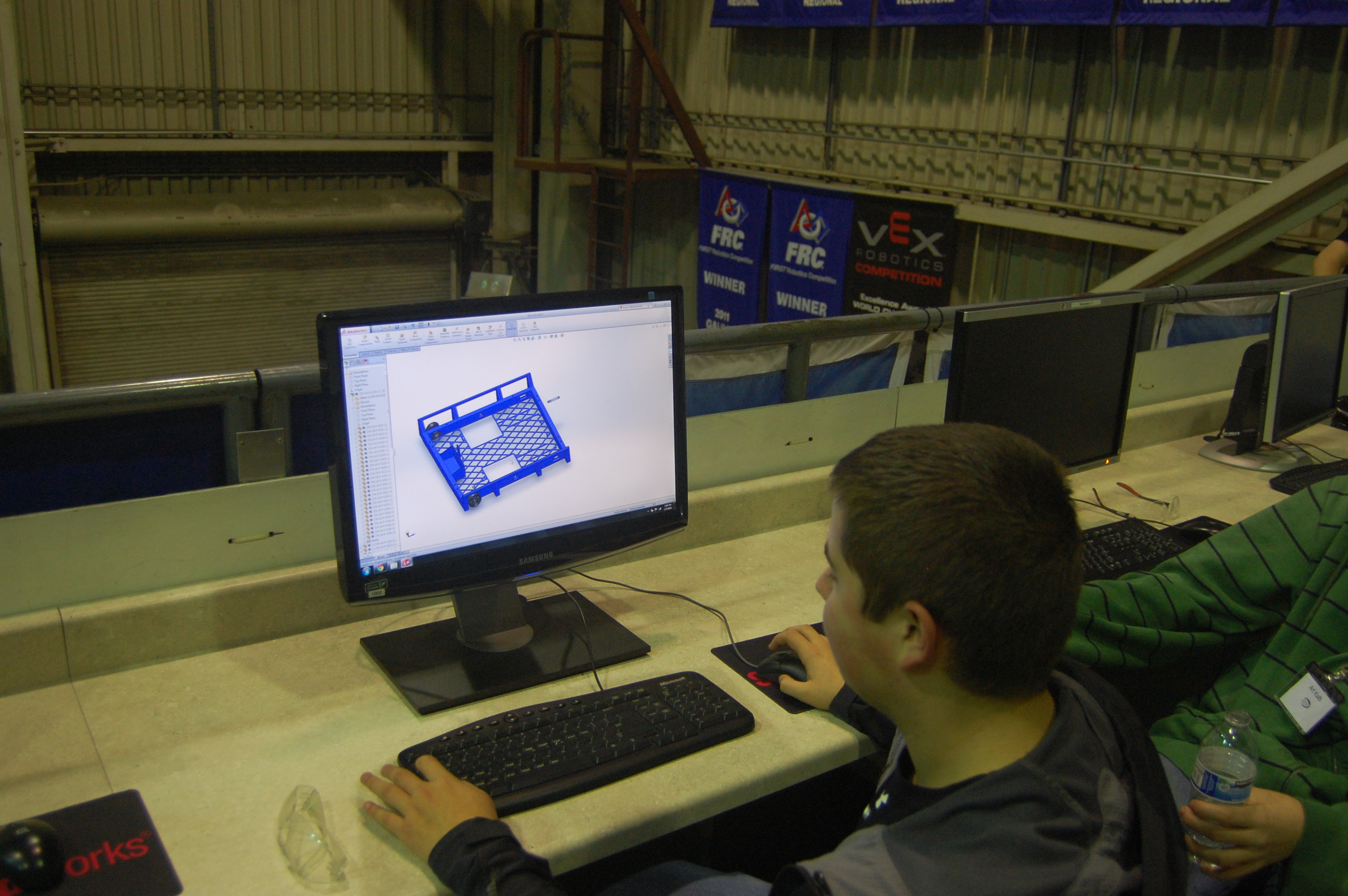
Drivebase Design
Today, work began on the robot drivebase, taking heavy inspiration from last year’s robot. The robot’s 6WD drivebase is the same overall size (28″ W x 27.75″ L) with wheel wells that can accommodate up to 1.5″ tread width. Today, we created a rough chassis in CAD and started work on the 2 speed drive gearbox.
The planned drive speeds are similar to last year (3 CIM motors per gearbox, 12:40 inital reduction, 15:48 low gear reduction, 28:38 high gear reduction, 3.5″ wheel diameter, 19.6 ft/s & 7.7 ft/s theoretical speeds). Due to the tight clearance between the 40T gear and the dog, the outer diameter of the dog will need to be reduced somewhat. Overall, this is a very similar gearbox to last year.
To determine the acceleration performance of our planned ratios, we performed a simulation of the drivebase accelerating. We decided to optimize the robot for 10-15 foot sprints and found that the ratios worked well with these goals. Furthermore, we found that while the 6 CIM drivetrain could reach 10 or 15 feet 10-20% faster than the 4 motor drivetrain, it drew much more power and could lead to premature battery drain.
Action Items
- Test flywheel shooter prototype.
- Test intake prototype with Mani.
- Continue working on drive base and gearbox design with Nagy.
- Compare all 3 shooter prototypes and decide on which we want to use.
- Continue work on drive code and autonomous planning with Stephen and Brandon.
