
Blog Archive
2015 FRC Championship
Overview
With the increased size of the championship from 400 teams last year to just over 600 teams this year, 4 new divisions were added: Tesla, Carson, Carver, and Hopper. Team 254 was a member of the Carson division and ended up seeding first, picking teams 973, 999, and 4499, and then unfortunately experiencing some bad luck and being eliminated in divisional quarterfinals.
However, the team received the Industrial Design Award for their outstanding robot and had a great time in St. Louis on Sunday.
Qualification Rounds
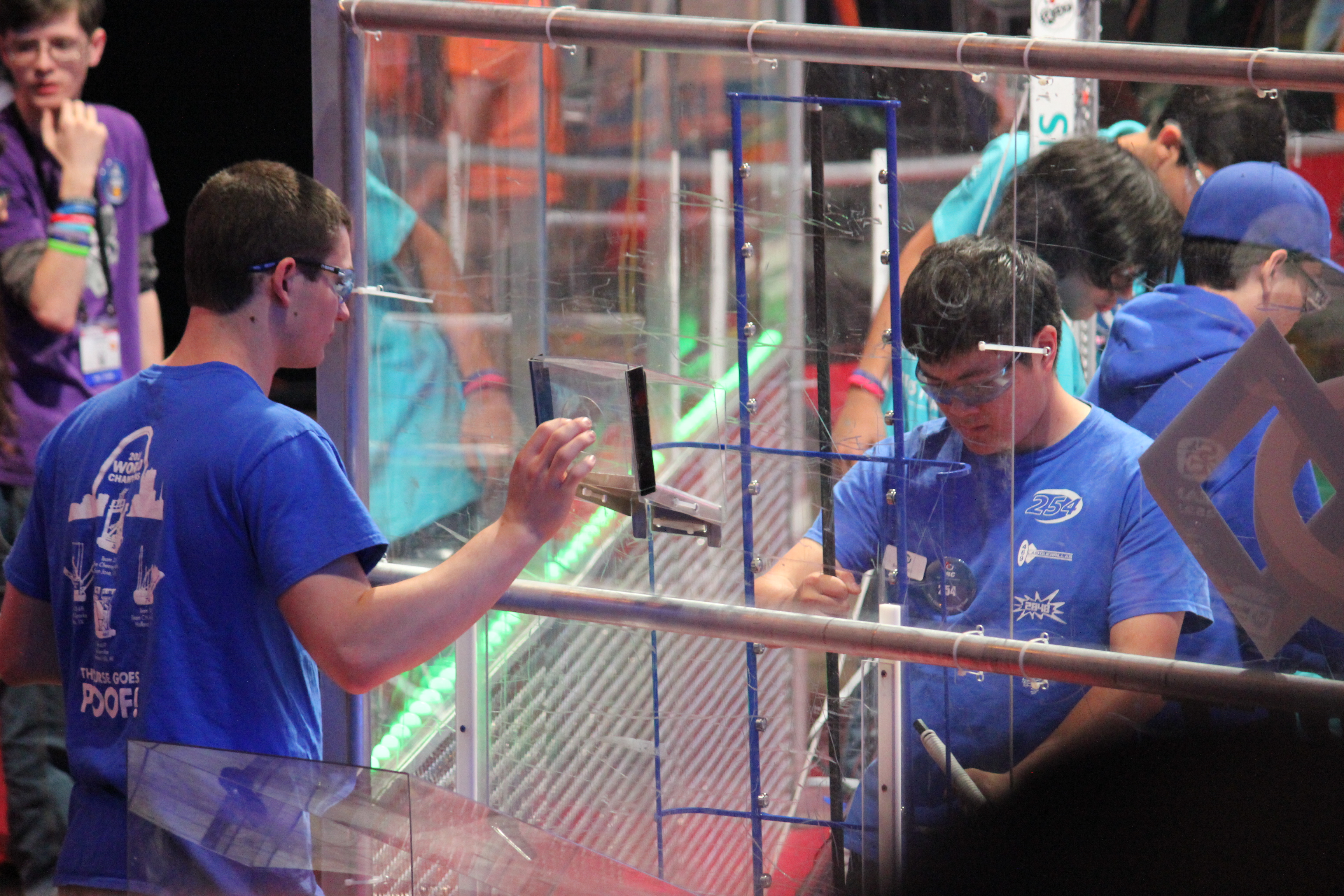
The team played a total of 10 qualification matches on Thursday and Friday. Some matches were tough, but in others the team scored more than 240 points! By the end of Friday, 254 seeded first with a qualification average of 211.1, the highest of any team at the Championship, let alone any official FIRST event.
Here are some videos of our Qual matches, recorded by Team 1511: Rolling Thunder.
Qual 9: https://www.yo…v=JZOhJp0zlb8
Qual 22: https://www.yo…v=RW7emwjSH3I
Qual 35: https://www.yo…v=tT2bwv63cBk
Qual 47: https://www.yo…v=FUoWPrFWpI4
Qual 63: https://www.yo…v=gWIw4apFnLg
Qual 70: https://www.youtube.com/watch?v=\-Epkfyrgus8
Qual 83: https://www.youtube.com/watch?v=1IeSvV7UJxg
Qual 91: https://www.youtube.com/watch?v=UDrRzd2mqQ8
Qual 103: https://www.youtube.com/watch?v=9bTKW90O1MY
Qual 114: https://www.youtube.com/watch?v=HepI6GlEOQg


Awards, Alliance Selection, and Playoffs
The team received the Industrial Design Award. This award celebrates form and function in an efficiently designed machine that effectively addresses the game challenge. The judges were impressed with the robot’s ability to stack effectively both from the landfill and from the human player station by using a tethered ramp. This year, awards were shared between 2 divisions \(about 150 teams total\), so to receive the award was quiet prestigious!
During Alliance Selection, Team 254 selected Teams 973: The Greybots, 999: The MechaRams, and 4499: The Highlanders. The alliance was hoping to strike a powerful balance between stacking from both the landfill and human player stations and using fast can grabbers to ensure we would always be able to put up as many stacks as possible.
However, despite all of the alliance’s efforts, they were sadly eliminated in the quarterfinals. In their first match, buggy autonomous modes meant 254 was unable to get the 20pt tote stack. Then, after playing a nearly perfect match after that, Team 973 accidentally set down their last second stack on a noodle, causing that stack to fall over and domino another stack. Despite the terrible score, the alliance hoped that they could score at least 215 points in their second match to keep themselves qualified for the semi\-finals. Once again, however, 973 ran into 254 during auto, disrupting it and scattering the yellow totes in the way of the cans on the field. Then, after auto, Team 999 tipped over onto the landfill, blocking many of the totes 973 needed to make their stacks. It was an unfortunate series of events and bad luck and the whole alliance was bummed to have been knocked out so early.
However, the boys didn’t stay upset for long, we quickly ran around and helped our friends \(1114, 971, 1678\) competing in other divisions. We loaned batteries to 1114, and cheered on our friends on 1678 as they went on to win the entire World Championship.




Relaxing in St. Louis!
On Sunday, students got to choose to either wake up at 10am and go to the City Museum or sleep in and meet up with the others at the Arch at 1pm. It was a lot of fun and really relaxing to hang out and take photos under the Arch for an hour before heading to the airport.
Overall, FRC Worlds this year was one of the best in a long time. All the students had a ton of fun and no one was really bummed for that long. We’re excited to return and hoping to do better next year!

Woodie Flowers Finalist Award
This afternoon, Lead Mentor Travis Covington received the Woodie Flowers Finalist Award at the Silicon Valley Regional!
This prestigious award is given to only one mentor at each regional for that mentor’s ability to effectively communicate with and inspire students.
After nominating Travis for this award for many years in a row the entire team was so ecstatic to see someone so deserving finally get recognized. The students and mentors were cheering as if they had just won the World Championships again!


USS Hornet Outreach Event
On Saturday, July 26, a few students and mentors demoed both our 2013 robot: Overkill and our T-shirt cannon: Shockwave at the USS Hornet Splashdown event. This event commemorated the 45th Anniversary of the historic Apollo 11 lunar landing mission. The aircraft carrier, the USS Hornet (CVS-12) was the recovery ship for Apollo 11 and Apollo 12. Buzz Aldrin, the 2nd man to set foot on the moon was there and spoke about the importance of the Space Exploration program and how we need to try to get on Mars to promote the next wave of innovators.
The team mostly demoed and spoke about but there wasn’t enough room to shoot frisbees or t-shirts indoors.




IRI 2014 Offseason Regional
IRI Competition
Everyone had a great time at IRI, reconnecting with old friends like 233, 1114, and 2056, meeting new people on different teams, and eating a lot of delicious corn! We went undefeated in our qualifying matches and seeded first, partially due to our powerhouse human player Brandon Wui with his “Jordan” throws into the robot. After choosing our alliance partners Team 1114: Simbotics, 330: The Beachbots, and 2013: Cybergnomes, we moved up the bracket all the way to the Finals, and after 2 very intense matches, we got second place! We were all very happy with our performance and very happy to have been able to attend IRI this year.


Fun in Chicago!
However, our adventures didn’t stop with IRI. After the very early first flight to Chicago, our connecting flight got cancelled. At first it looked like we’d be spending 12 hours wandering around Chicago airport, but the mentors decided to make it an adventuring day through the city of Chicago! We took the famous L train into downtown and had some fantastic Chicago style deep dish pizza at the world-famous Giordano’s Pizza. Next stop was the Bean in downtown Chicago, then finally we found a nice shady patch of grass in which both mentors and students took very needed naps, and some ended up with a little grass on their foreheads. Finally we made it back to the airport and on our plane home. Thank you to all of the teams and staff at IRI for making such a great competition and we hope to be able to go next year!



NASA Robotics Alliance Celebration
On Tuesday, June 10th, Teams 254s, 971 and 1868 met with NASA Ames’ Director Dr. Simon P. Worden, to celebrate the accomplishments of the teams and thank Dr. Worden for the center’s generous sponsorship over the years.
The 3 teams were recognized for their success in the FRC, VEX, and Botball competitions this past year and all the students were given certificates. The teams thanked NASA, their mentors, and their parents for all the support they’ve received throughout the lifespan of the team.
Members of the audience also got to re-watch some of the exciting Einstein finals matches and relive Team 254’s World Championship win.
A dessert reception hosted by Team 1868 and socializing took place after the event.



2014 Waterloo Regional
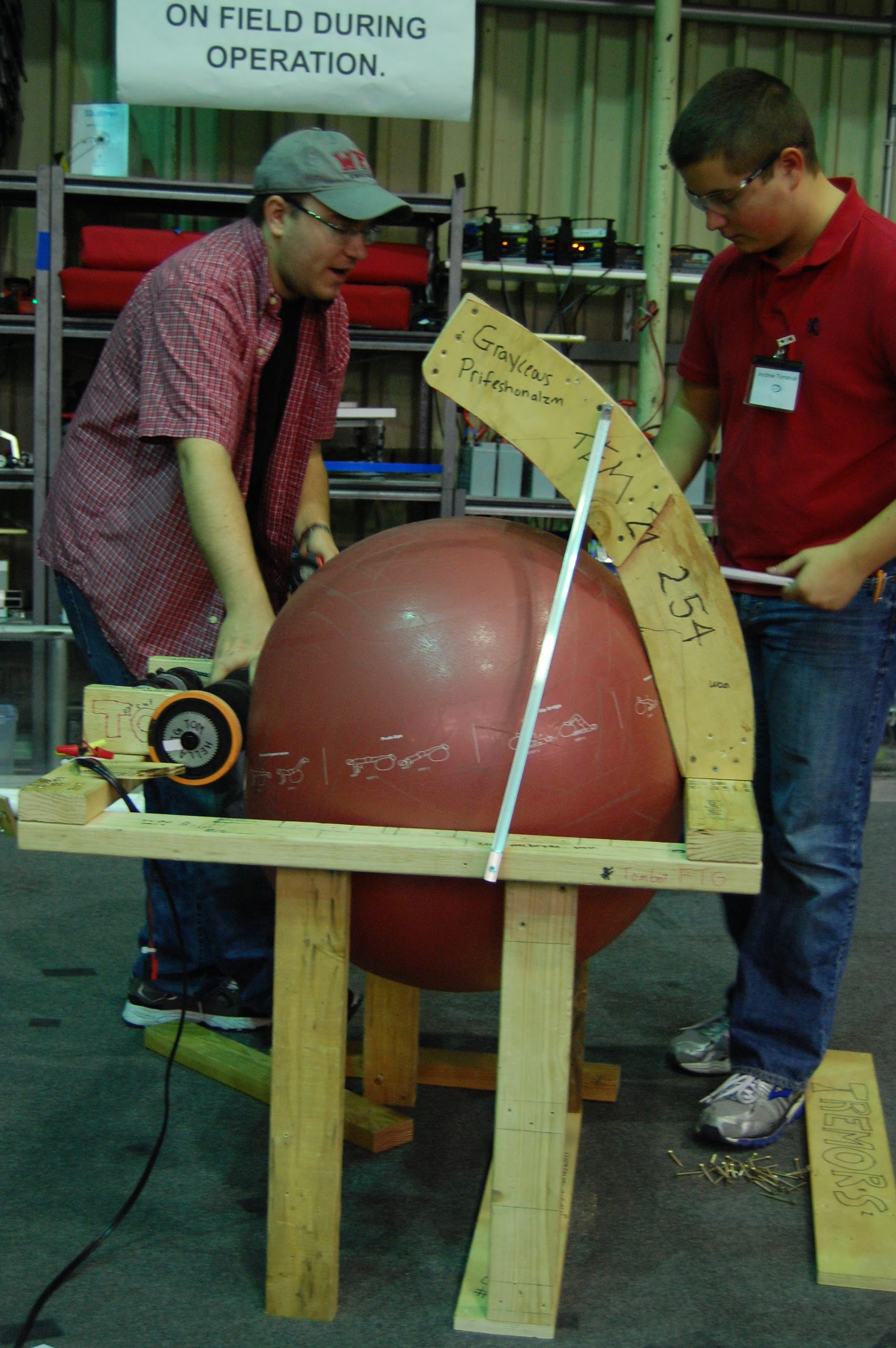
{“data”:[{“type”:”text”,”data”:{“text”:”by Andrew Torrance ’15\n”}},{“type”:”text”,”data”:{“text”:”This past weekend, Team 254 had a great time competing at the Waterloo Regional in Ontario, Canada. We traveled all the way from San Jose, California to compete against some of the best teams in the world and made some new friends along the way. In the end, the team seeded second, picked Teams 2056 and 865 and went on to win the tournament, the Quality Award, and the Gracious Professionalism Award.\n”}},{“type”:”heading”,”data”:{“text”:”Summary of Accomplishments\n”}},{“type”:”list”,”data”:{“text”:” – Tournament Champions with Teams 2056 and 865\n – 17\\-2 Win\\-Loss record through Quals and Elims\n – Number two seed\n – Quality Award\n – Gracious Professionalism Award \n – Set the current world record score of 350 without penalties\n – 34 blue banners, more than any other team\n – Highest scores Autonomous and Assist categories over first\\-seeded team\n”}},{“type”:”heading”,”data”:{“text”:”Travel and Extra Fun\n”}},{“type”:”text”,”data”:{“text”:”The team flew from San Francisco airport to Chicago and then to Buffalo. We drove the rest of the way to Waterloo. On Thursday night we had dinner with our friends from Team 1114, the SimBots, and had the chance to meet and make new ones. After elimination matches, all the students ran outside and had a huge snowball fight with Teams 1114 and 865. Most would agree that the Canadians won. On Saturday night, all 16 students hung out in the hotel and had fun talking and bonding. On the way home, we also stopped briefly at Niagara Falls for some more great memories! \n”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/03/966307d6-1779099_737078946331830_615133729_n-400×300.jpg”,”full”:”//media.team254.com/2014/03/966307d6-1779099_737078946331830_615133729_n.jpg”},”text”:”The snowball fight resulted in frozen hands but was a lot of fun!”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/03/8eb907a2-10151919_737483919624666_141238645_n-400×224.jpg”,”full”:”//media.team254.com/2014/03/8eb907a2-10151919_737483919624666_141238645_n.jpg”},”text”:”It was very cold when we visited Niagara Falls”}},{“type”:”heading”,”data”:{“text”:”Qualification Matches”}},{“type”:”text”,”data”:{“text”:”The team set up the pits on Thursday and participated in practice matches, including one with powerhouse teams 1114 and 2056. On Friday we presented Chairman’s, spoke to judges, and played 10 qualification matches. Throughout the entire day, a group of mentors and students constantly ran around the pits to discuss strategy with our partners. Oftentimes we would help temporarily modify our alliance partners’ robots for a specific role in a strategic cycle we had planned. We frequently helped them fix autonomous code and intakes so they could inbound and pass the ball more easily. On Saturday the team won its remaining 3 qualification matches, allied with 2056 in one match and against them in another. Finally, we were seeded second behind Team 4039 and in front of 2056.\n”}},{“type”:”heading”,”data”:{“text”:”Alliance Selection”}},{“type”:”text”,”data”:{“text”:”During alliance selection, the first\\-seeded team, 4039, chose 1114. To counter this, we chose team 2056 and later 865 to help inbound and play defense. Other powerful alliances formed included Team Dave \\(3683\\) and 1241. Even with our small group of students and limited scouting team, the mentors and students worked hard and believed they had picked a winning alliance.\n”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/03/8ec507a7-1383663_736970153009376_1917831583_n-400×300.jpg”,”full”:”//media.team254.com/2014/03/8ec507a7-1383663_736970153009376_1917831583_n.jpg”},”text”:”254, 2056, and 865 formed the second seeded alliance”}},{“type”:”heading”,”data”:{“text”:”Elimination Matches”}},{“type”:”text”,”data”:{“text”:”The elimination matches saw some of the fiercest competition. All throughout the quarter and semi finals the robot faced heavy defense and was getting some nicks and scratches, but still managed to hold up well. In the second semifinal match we managed to run the \”Go for Gold\” cycle nearly flawlessly, scoring 60 points each cycle when 2056 caught our truss throw. This match put up a new current world record of 350 points without penalties. On the other side of the bracket, Team 4039 and 1114 were defeated by the number 4 seeded alliance with Team Dave and 1241. The Simbots lost two of three matches specifically through technical fouls \\(50 points each\\) that shifted the favor to the blue alliance. In the finals against Team Dave’s alliance, we managed to edge out a victory in just 2 matches running the \”Omaha\” cycle and playing defense on Team Dave. The exciting finish was celebrated with a huge snowball fight outside with members from 1114 and 865.\n”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/03/963a07cc-1557591_737044533001938_1710069045_n-400×300.jpg”,”full”:”//media.team254.com/2014/03/963a07cc-1557591_737044533001938_1710069045_n.jpg”},”text”:”The current world high score without penalties of 350 points.”}},{“type”:”heading”,”data”:{“text”:”A Great Finish!”}},{“type”:”text”,”data”:{“text”:”During the awards ceremony, Team 254 ecstatically received the Quality Award for their beautiful robot with a 3 ball autonomous and clean pit. We also received the Gracious Professionalism Award for helping so many teams at the tournament with everything from repairing electronics and drivetrains to fixing their code. We are so grateful to have participated in this regional and extremely thankful to all the Canadian teams, volunteers, and others, who were extremely welcoming and friendly. We had a great time making new friends and a lot of the team discussed the possibility of returning to the regional next year.\n”}},{“type”:”image”,”data”:{“file”:{“url”:”//media.team254.com/2014/03/8eb107a8-1925177_736038989769159_1133013955_n-400×300.jpg”,”full”:”//media.team254.com/2014/03/8eb107a8-1925177_736038989769159_1133013955_n.jpg”},”text”:”The judges recognized us with the Quality Award for inspiring others with our pits, displays, and robot”}}]}




Day 50: More Pre-Comp Preparations
Driver Practice
Today, students continued to practice driving the robot on the field. Obstacles were set up on the field earlier in the day to test the new drivers’ capabilities.Later, students practiced driving with other students in the human player boundaries feeding the robot balls.


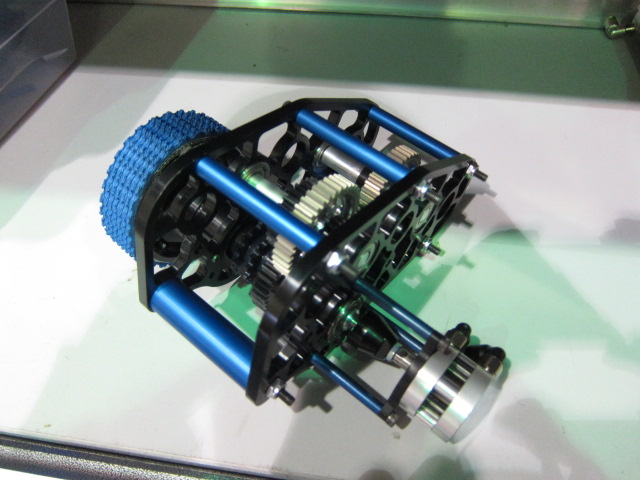
Demo Gearbox
Students finished assembling the display gearbox.
Chairman’s Award
Students added pictures to the Chairman’s Award PowerPoint. Finding the right pictures is a big process in creating the presentation.
Technical Binder
Students worked on updating the technical binder for the Chairman’s award. This binder contains all of the specifications for the robot.
Team Flyer
Students continued to work on drafting the Team Flyer. The flyer is an easy way toinform other teams and passersby during tournaments about the robot and theteam. This is a simplified version of the technical binder. However, after some further discussions we decided to try remaking the flyer with a shot of the robot with the intakes opened. That photo is being photo shopped now and will be used soon.

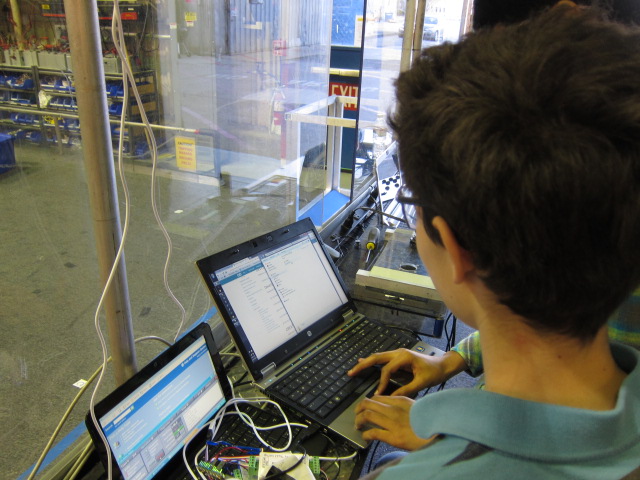
Programming
Programmers continued to work on the pit display. Currently, they are working on fixing the team page.
Field Optimization
Students started to improve the field by configuring the scoring lights. These lights indicate whether the robots are in autonomous or in tele-op mode. This will help simulate a real game for driver practice.

Assembly
Students began constructing an intake on-top of the Overkill Practice Drive-base made of wood for a drivers to face-off against.

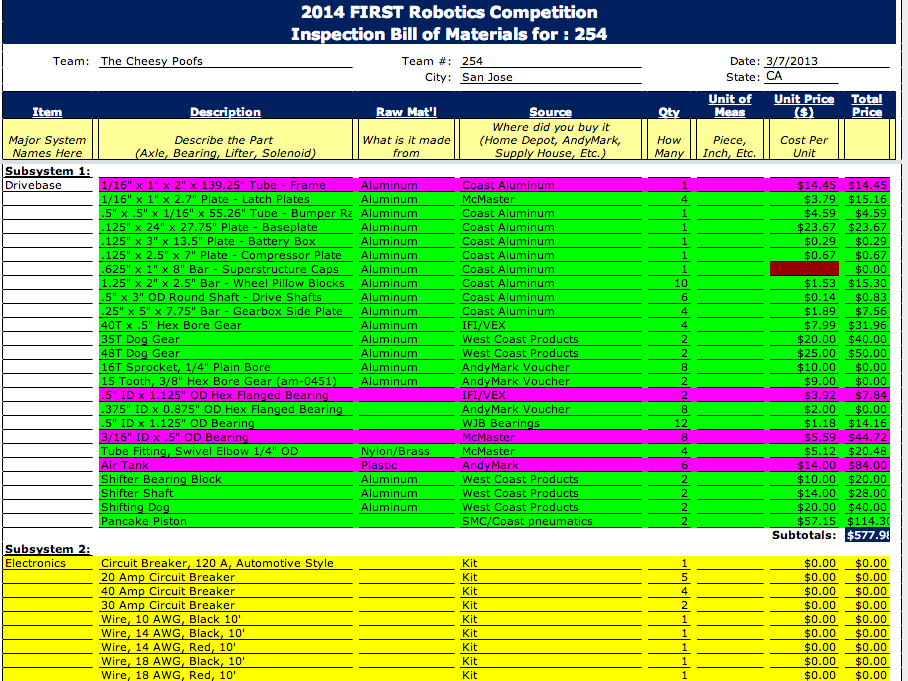
Bill of Materials
Students continued working on the Bill of Materials. Today they finished recording data for the intake, electronics, and are currently working on the hood.
Action Items
- Continue working on the BOM
- Continue driver practice
- Continue improving Chairman’s Script
- Finalize Chairman’s Video storyboard
- Improve Chairman’s PowerPoint
- CNC the new rear VEX bump sensor mount
- Finalize the Team Flyer
- CNC new wheel hubs
Day 49: Chairman’s and Driver Practice
Chairman’s Award
Today students brainstormed and storyboarded the 2014 Chairman’s Award Video. This video is required with all Chairman’s entries and the winning team’s video is shown at the end of each tournament. Also, another group continued work no a Chairman’s Powerpoint template that will be used during the presentation. Finally, the three presenters continued to flush out the script and got to practice 2 times before mentors and get their thoughts on what information should be added.
Driver Practice
Drivers worked on receiving the ball from the human player without utilizing the rear intake. They rigorously practiced pinning the ball to the side wall to force the ball into the intake, in an attempt to lessen ball transfer time.
Field Construction
Students finalized the field construction today by adding the human player boundaries on the side of the field. This boundary tell the human players exactly where they are allowed to stand, which help make driver practice more realistic.

Programming
Programmers were brainstorming ideas for a possible Team 254 mobile app that will feature all the web products 254 has to offer. This includes the hours tracking systems, various resources (handbook, identity standards, tutorials), and the home page with a simple calendar.
Graphic Design
Students continued to program the team’s new pit display. Others were adding sponsors to the 2014 T-shirt. Students were also rendering specific assemblies in of the CAD for use in the Technical Binder. These renders all people to more easily see the functions of each mechanism of the robot and they all work independently and then come together into one finished product.
Assembly
Students began to assemble the 5th, display gearbox. All the parts have been found and the gearbox simply needs to be assembled. In addition to being a useful display piece to explain the 3-CIM shifting gearboxes we are using this year, this will also serve as a spare gearbox we can use or at least scrap for parts if something breaks at competition.
Miscellaneous
Students continued to work on the Bill of Materials (BOM) by using the CAD and Parts Management System to figure out what parts we ordered and what actually made it onto the robot. Currently the drivetrain is finished and electronics and intakes subsystems are in progress.
Work on the release video made significant progress. A first draft was made featuring “Light em Up” with shots of the robot and the double-3-ball-autonomous. This draft can be viewed at this link: //video.team254.com/watch/hhZjlzazqf4JTKXlP62-pq2Q3vi1pTBQ
As this is only a draft and not the final copy, don’t share this yet!
Action Items
- Finish assembly of demo gearbox
- Continue working on the BOM
- Continue driver practice
- Continue improving Chairman’s Script
- Finalize Chairman’s Video storyboard
- Begin work on compiling the technical binder
- Begin work on compiling the Chairman’s binder
- Create Chairman’s PowerPoint
- Decide what spare parts need to be made, including for demo
- CNC the new rear VEX bump sensor mount
- CNC new wheel hubs
Day 47: Rest!
Everyone took the day off today as a reward for all the hard work we put in over the past 6 weeks to get the robot bagged!
Day 36: Practice Robot and Release Video
By Luke Gardner
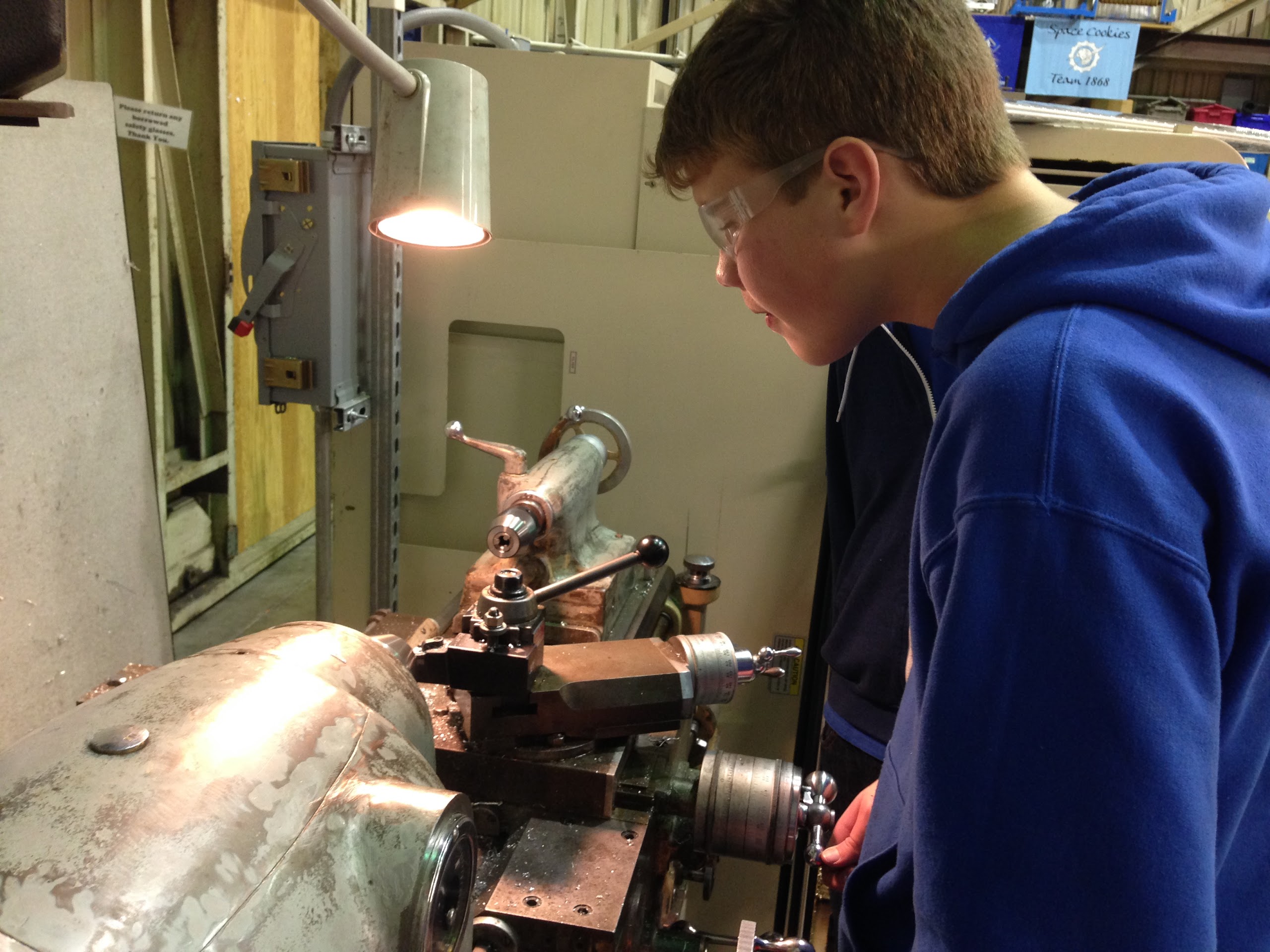
Machining
Students machined wood for the bumper and the pool noodles arrived. Parts for the control board were machined for later construction.
Robot Construction
Work on the practice robot continued including more wiring and work on the gearboxes. The pneumatics for the pinniped were built and attached to the robot. The gearbox for the intake was attached. Work on the bumpers began late in the night.

Programming
Our programmers worked on a team hours app, and others also researched and brainstormed the LEDs for the pit in Waterloo.
Later in the night the programmers worked on the mechanisms within the robot code.
Release Video
Students brainstormed and started writing the script for the release video, as well as collecting pictures and videos to be used.
Miscellaneous
More catchy slogans were thought up to be put on the Canada T\-shirts such as “Get ready to Waterlose” and “We came for the bacon and stayed for the robots.” The outside wood was organized according to size and dimension. The shed is mostly organized now and should not have to be disturbed until packing.
Action Items
- Assemble robot with Mani and Abhi
- Build Bumpers (cut pockets into wood and finish marking up Cordura)
- Programming with Kevin and Brandon
- Check trello
Day 33: Finishing up machining and wiring!
CAD and Machining
The CAD is nearly finalized and only minor details were flushed out tonight. The various gearbox plates \(intake, front intake, rear intake, shooter\) were finalized and CNCd. Today we also machined new pieces for the shooter drive shaft. Super structure,and shooter were cleaned with scotch bright. Soon a bunch of parts will sent to be powder\-coated. Once all parts are back from powder\-coating, all we have to do is assemble the robot!


Drive Base Wiring
We finished up wiring the competition bot and are nearly finished wiring the practice bot.

Scouting
Today students and mentors began to discuss methods of scouting the game at regional events, determining objective metrics to compare robots. This will continue over time.
Prototypes
Today all the prototypes for this year’s challenge were disassembled and the parts put back in their containers. We no longer need the prototypes and they were just taking up space. However, they served their purpose.
Miscellaneous
We cleaned out and organized the Mentor and Office Supplies Cabinets to make our mentors happier.
We also now have made 2 of the plates for the cordless drill holder. More plates will be machined when we have time.
The robot cart had some extra rails attached to sides for strength. The entire cart was prepped for power\-coating.
Action Items
Finish machining parts for the shooter and front and back intakes. Send to power\-coating as soon as possible.
Finish wiring practice drive base.
Finish Chairman’s \(see Jeremy\).
Day 19: Advancing Prototypes, Prepping for Welding
by Joncarlo Avila and Brandon Wui
Prototyping
Today, we worked on prototyping an improved catcher and ball indexer. Our new catcher consists of 2 pistons that open and close the catching mechanism. We also removed the intake and shooter from the Overkill practice drivetrain for easier testing.
We made two new indexer prototypes with the goal of minimizing piston use to save air and weight. One group built a prototype that used a 6″ stroke piston to simply push the ball into the flywheels. Another group finished another variant of an indexer. This one features a 3″ stroke piston that pushes a linkage together so that it “claps” to move the ball up. The clapping indexer worked slightly better than the linear one and also uses a smaller piston. Late at night both of these prototypes were tested with the shooter and both showed consistent shots and improved accuracy over the former indexer.




Programming

Machining: Drive base
Today, we received our waterjet base plates from sponsor BAE Systems. We riveted the plates to the chassis rails which were machined over the weekend and jigged the weldment for welding. Students also worked with wire brushes to clean the aluminum oxide off of the parts to help with welding prep. The drive base is now ready to be sent out to be welded by sponsor Applied Welding Technology and will hopefully be received tomorrow so that we can prep it for power coating.
Action Items
Check the Trello!
If drive base is back from welding, prep it for powder coating.
Continue working on the indexer prototypes, testing with variable ball sizes and PSI for consistency.
Day 16: Programming, and Prototypes
Programming
Today, the programmers worked on two major projects and a smaller one. The two larger projects were a data logger for the robot and an app for members to check their FRC Hours. The smaller project was to get Adobe products which had been generously donated to the team onto a few of the lab computers.
The Data Logger will return data from all the parts of the robot and plot them on a graph.This will help the programmers to detect what is going on in different parts of the robot and at what time it happened. They plan to fix the single plot graph and make the logger capable of tracking different sub-systems.
The FRC Hours mobile app makes viewing member hours more accessible. This should make it easier for members to track how many hours they have completed and how many more they need to do. The programmers plan on adding more functions onto it later, including even a signup system for the builds.
The final thing that the programmers worked on was putting Adobe InDesign, Photoshop, and Illustrator onto the lab computers. This took a lot of time as there was one CD of each to go around, and ultimately, they could not finish installing each by the end of build.
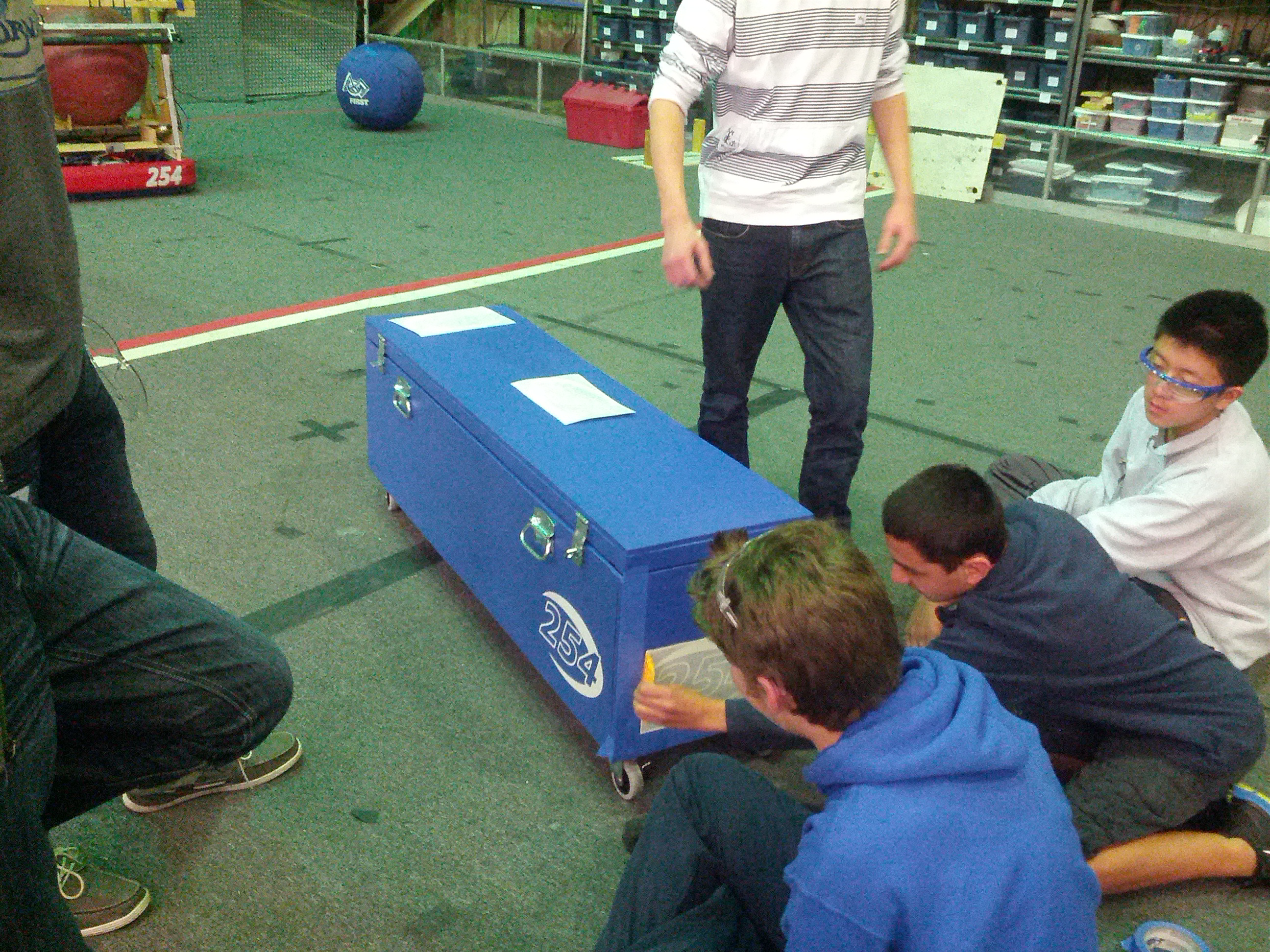
Pit Shelving Box and Robot Shipping Crate
Today, we also upgraded the pit shelving box. The base was re-painted in two coats, a flat coat and then a secondary semi-gloss coat, all in blue. The cover of the box was also redone, using less pieces so that it looked cleaner. Two handles and four wheels were added to enhance box mobility. The hinges were also supplemented with gas springs to hold the lid open during loading and unloading.
Members also touched up the paint on the shipping crate, last painted in 2011. The two new boxes look great and we’re excited to bring them to competition!

Prototype Catcher
Students built an improved catcher that more closely resembles the CAD (one that can actually fit on the robot). They attached pistons to the catcher so it could open and close. They also brainstormed the structure of the side of the catcher. They were unable to finish the rest of it due to a lack of material, which will all arrive by the next build. They will then attach the material to the side and the back of the catcher so that the ball will not fall out of the catcher upon being caught. Additionally, they added some blue paint to the structure of the robot prototype.
Manufacturing: Bumper Supports
Students also used the mill to make the metal bumper support brackets, which are needed to attach the bumper to the robot drive base. They were able to finish this and will soon be riveted together and sent out to be welded.
Action Items
- Sign up with Kevin Vincent, Greg Magarelli, and Peter Feghali if you are interested in helping or have the skills to contribute to the media team (in short, if you want to be a part of any or all of the following: photoshop, graphic design, photography, video design and editing, 3-D animation, website operation, social media updates, publicity releases, and CAD rendering)
- Help Stephen and Brandon install Adobe software on the lab computers
- Brainstorm additional functions for the 254 Hours Mobile App for Brandon and Stephen
- Brainstorm ideas with Ian Kirkland for media posts
- Machine the front brace, back brace, and top plate for the cordless drill holder.
Day 15: CAD, Machining, Prototype Robot, Programming, S’MORES!
by Clay Rosenthal
Important Reminder
Wear safety glasses on bottom floor of lab at all times! Even if you are not machining or there are few people in the lab this is a requirement.
CAD
Today, work continued on the design of the inner plates of the hood. We also investigated the use of a Watt’s linkage for lifting the ball into the shooter. The Watt’s linkage has a large (approximately) linear region in the center of its travel that we could use to lift the ball straight into the shooter. A separate lifter idea used a 4 bar linkage to lift the robot. Work on both of these projects will continue tomorrow.
On the drill holder, holes for the large Milwaukee and DeWalt drills were prototyped today and the CAD was approved. This will soon be sent to Good Plastics for routing.
Buttons were added to the CAD of the control board to our operator’s specifications.

Machining
More pieces for the drivebase chassis were cut today including 4 frame side rails. Also, middle bumper supports were machined with the mill. These will eventually be riveted together with the rest of the chassis and sent out to welded and powder-coated.


Robot Prototype
The prototype was tested today. The robot was able to intake, “pop” the ball, and shoot it with driver control in the afternoon. The robot has balance issues that can cause it to tip and fall on occasion, as shown in yesterday’s post. In the evening adjustments were made and there arose complications involving the pistons for the popper not rising at the same time. This was fixed but will need to be perfected. The hood was extended to change the firing angle and the fly wheel had an extra wheel added. A button was added to the intake to help with autonomous. Also a more solid back plate was added to help keep the ball in. All of these modifications are making the shots faster and improving consistency and accuracy.
Programming
Today, the programmers first worked on designing an auto-intaking control loop to hold a ball in the intake off the ground while another ball is in the robot. This will allow the robot to transport multiple balls in autonomous. The control loop started very rough, simply running the intake whenever the ball lost contact with a bumper switch. Later, we added an encoder to the roller and designed a control loop to smooth the intake.
The second thing that we focused on today was the data grapher webpage. We decided what the layout of the JSON file that we send would be. We eventually decided to go with one big file that would contain many separate JSON objects for each graph.
Finally, the programmers worked to implement a simple two-ball autonomous routine. While it takes far longer than ten seconds to run, it is a good proof of concept.
S’mores
Late at night, we made s’mores using a heat gun. It worked really well and the s’mores tasted great! We should do this more often.
Action Items
- Check the Trello!
- Finish refurbishing of the pit shelving crate (repaint, attach hinges/latches, add wheels)
- Programmers: test flywheel controller and intake state machine.
- Begin CAD of the Battery Cart.
- Continue improving robot prototype, make more consistent.
Day 5: More Prototyping and Gearbox CAD
Flywheel Shooter Prototype
Today, we continued work on a new flywheel shooter prototype. The team determined that smaller shooter wheels would make the shooter more packagable in the robot. We made some great progress and we should be able to complete it tomorrow.
Design
Work continued on the drive gearboxes today. Based on the results of the simulation discussed yesterday, we decided that we would move forward with 2 3 CIM motor gearboxes but would also design 2 CIM motor gearboxes that could be swapped in if necessary. Although this would reduce acceleration, it could lighten the robot by up to 8 lbs.Today, we added the Bimba pancake pistons to the two speed gearbox assembly. We are moving forward with the previously discussed ratios of 4.2:1, 19.6ft/s in high gear and 10.6:1, 7.6ft/s in low gear. The CAD is almost done and is only missing a few components.
Programming
Today the programmers continued work on the graphing system for the robot. They worked on getting a TCP/IP server running on the robot and working out the technicalities of using a browser to monitor the stream of data from the robot.
Action Items
Finish Gearbox CAD, begin finalizing Drive base CAD
Day 4: Prototypes, Coding, Drive base design
Catcher Prototype
Today, we continued work on the catcher prototype, making it higher and wider so that it can better catch balls from all angles. Although the catcher is promising, its large size may be a problem when packaging mechanisms for the robot.
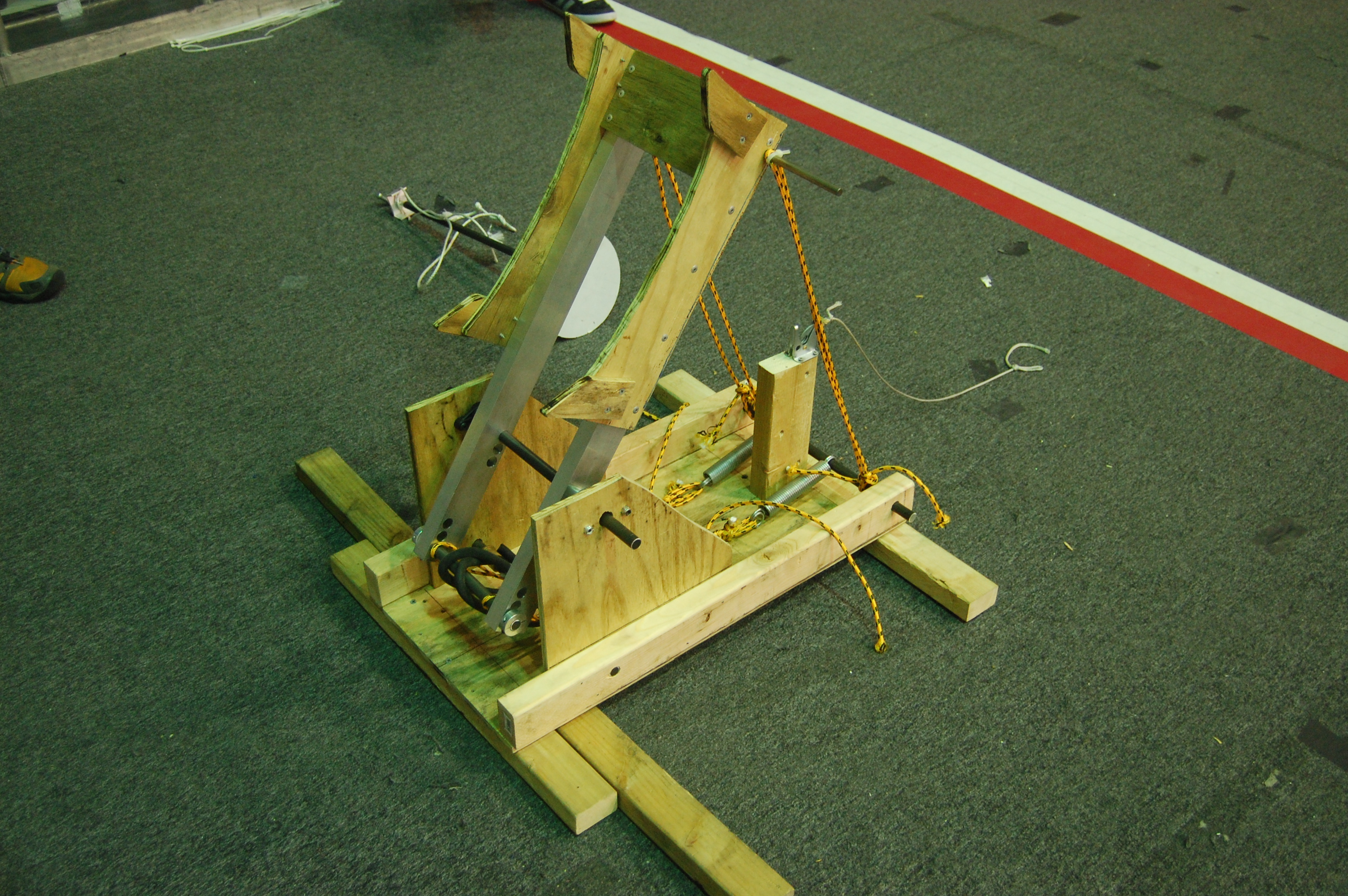
Catapult Prototype
The catapult prototype was finished today. The shooter is very smooth and can be easily reloaded in less than 5 seconds. It is consistent and accurate from up close (~2 ft from high goal) but mediocre from midway to the white zone. This shooter suffers from inconsistency in ball positioning within the catapult which could be improved with a better ball cradle.
Flywheel Shooter Prototype
The flywheel shooter has been the most successful thus far with accuracy, precision, range, and simplicity. Because of its success (especially in scoring all 3 balls in under 5 seconds), we took it apart to replace the large wheels with smaller wheels while narrowing it to maintain ball compression with the smaller wheels. We hope to test this tomorrow.
Programming
Today, the programming team worked to get the 2013 practice robot up and running to test the drivebase. Several problems were encountered along the way. First, they had an SDK error on the robot which took them a long time to fix – eventually a cRio reflash solved the problem. Second, there was a problem with the wiring on the robot so they weren’t receiving any data from the TCP server. They eventually fixed the problem and now they are working on a way to graph the data from the robot in a quick and easily readable way.
Over the next few days they will also work on are prototyping some autonomous for the robot as we determined the autonomous is very important strategically.

Autonomous Strategy
We have determined that the autonomous period is critical to our success in Aerial Assist, allowing the robot to score up to 65 points. Because of this, we want our robot to be able to score 3 balls in under 5 seconds. The flywheel prototype is the most promising for meeting this objective.
Over the next few days, the programming team plans to start working on drivebase control loops for autonomous, using Overkill as a practice base.
Drivebase Design
Today, work began on the robot drivebase, taking heavy inspiration from last year’s robot. The robot’s 6WD drivebase is the same overall size (28″ W x 27.75″ L) with wheel wells that can accommodate up to 1.5″ tread width. Today, we created a rough chassis in CAD and started work on the 2 speed drive gearbox.
The planned drive speeds are similar to last year (3 CIM motors per gearbox, 12:40 inital reduction, 15:48 low gear reduction, 28:38 high gear reduction, 3.5″ wheel diameter, 19.6 ft/s & 7.7 ft/s theoretical speeds). Due to the tight clearance between the 40T gear and the dog, the outer diameter of the dog will need to be reduced somewhat. Overall, this is a very similar gearbox to last year.
To determine the acceleration performance of our planned ratios, we performed a simulation of the drivebase accelerating. We decided to optimize the robot for 10-15 foot sprints and found that the ratios worked well with these goals. Furthermore, we found that while the 6 CIM drivetrain could reach 10 or 15 feet 10-20% faster than the 4 motor drivetrain, it drew much more power and could lead to premature battery drain.
Action Items
- Test flywheel shooter prototype.
- Test intake prototype with Mani.
- Continue working on drive base and gearbox design with Nagy.
- Compare all 3 shooter prototypes and decide on which we want to use.
- Continue work on drive code and autonomous planning with Stephen and Brandon.
Day 2: Prototyping, Drive base Design, Initial Coding
Prototyping Shooters
Three different teams worked to design, build, and test three different ways to launch the ball. They built a catapult, a linear launcher, and a flywheel shooter.

Catapult Launcher
A catapult was designed and built today using a system similar to other catapults we’ve seen for this year and 2008. This quick prototype was not strong enough to launch balls far enough and the team needs to improve the design tomorrow perhaps by making it more stable and utilizing another tension device such as surgical tubing.

Linear “Trident” Launcher


Flywheel Shooter
The flywheel shooter was completed today, and students and mentors began testing with it. Of the three shooter prototypes, the flywheel had the best shots and most consistency. Additionally, the team could test the effects of ball pressure on the consistency and accuracy of shots for the first time in the season. By the end of the night the flywheel shooter made about 1/3 to 1/2 of its shots.




Programming
The programmers met today and decided on what they wanted to work on for the next few weeks.
It was decided that we would like to spend time building debugging tools for the robot. The main thing that needs to be built is a way to live graph motor and sensor states, much like the PID tuner we had in 2012.
The programmers also decided to rework how autonomous mode will be executed so that control flow can be used in autonomous rather than just a straight sequence of events.
Tom and Stephen started a new Java project for the 2014 robot and got basic CheesyDrive working on the 2013 practice drivebase. This code will use a new subsystem architecture and will use very little code provided by WPI.
Field Assembly
The team completed the construction and mounting of one full set of high goals. The goals have a ramp designed to return the balls back onto the field so that they do not fall onto drivers. We will use these wooden goals while we wait for the official set to come in from FIRST.
Drive Base Design
Today, the team began modeling parts for the gearboxes and chassis. We plan to design a drive base similar to last year but without a PTO on the gearbox. Tonight, we designed the gearbox output shafts, intermediate shafts and wheel shafts which will be sent out to sponsor Modern Machine Company tomorrow.
Action Items
- Continue gearbox design
- Continue testing and improving flywheel prototype.
- Continue testing puncher prototype, try to increase power.
- Rebuild catapult prototype, must be stronger and more stable.
- Programmers continue improving drive code and autonomous tuning with Tom.
- Improve catcher prototype with Dan.
- Possibly begin machining parts for the drive base.
254A receives Excellence at Bakersfield VEX Tournament
On Saturday, December 14th, VEX Teams 254A and 254F competed at the Frontier Titan Robotics Tournament in Bakersfield, California.
Our teams had some tough matches in the qualifying rounds, and even had to go against each other. Despite that, 254A went undefeated and seeded 3rd, while 254F seeded 13th.
254F was picked by the 2nd seeded team, 563, Titan Robotics. This alliance later picked Team 1437X, Patriot Robotics.
254A picked 1437Z and then 1437Y, Patriot Robotics.
After easily getting through the quarterfinals, 254A had to face 254F in the semifinals. 254A ended up narrowly advancing to face the number 1 seeded alliance featuring teams 21D, 21, and 1837A. In the finals, robot problems plagued 254A’s alliance in the first round. Then, in the second round a field disconnect occurred that resulted in 254A, 1437Y, and 21 being disconnected and only 21D left to play the match by themselves.
During the awards ceremony, Team 254A was given the Excellence Award for their outstanding performance in Qualification Rounds, Robot Skills, Programming Skills, and presenting their Design Process. This means that either 254A or 254B (who received Excellence at the Bellarmine VEX Tournament) are eligible to receive the Excellence award at the State Championships in March.
Team 254F and 254A win VEX Tournament
On Saturday, October 19th, all 7 of Team 254’s VEX Teams competed at the Dougherty Valley High School Robotics Tournament in San Ramon. Subteams A through G competed well during qualification matches. One of the most memorable highlights was that in the first match of the tournament when four 254 teams ended up in the same match! Teams F and G beat Teams D and B in match that was both extremely unlikely and unfortunate to watch as it put 2 of our teams behind right from the beginning. Because the tournament was running late, they had to cut number of qualification matches from a scheduled 7 down to only 4. However, most of our teams still did well. Team F went undefeated and was ranked second. Teams D, A, and B finished in 19th, 20th, and 21st place, respectively.
During alliance selection Team 254F picked the Team 21, the Spur Flies and later Team 254A. Team 254G was picked by fourth ranked 8000A and later allied with Team 6088. Team 254D and 254E were picked by Team 1868X, the Space Cookies. Finally, Team 254B was chosen by Team 21C and allied with 9378A.
In the elimination matches, Team G’s alliance defeated Team B in the quarterfinals, and the alliance of Team D and E was eliminated by the number 1 ranked alliance, 9378R, 8000B, and 8000C. In the semifinals, Team F eliminated Team G. Team 254F and 254A went on to the finals to play against the number one ranked alliance. After 2 stressful and intense matches, Team F and Team A managed to capitalize on robot failures of the opposing alliance and secure a victory! By being the champions of the tournament, Teams F and A are now qualified for the California State Championship in March.
