
Day #14: Prototyping, Programming and Designing
Prototyping
Shooter
The shooter protoype is coming along as students worked to test an added polycarb cover. To test the effectiveness of smaller wheels on the shooter, a group worked on replacing the treaded wheels with Banebots wheels. Tests proved favorable for the treaded wheels.
Intake
Leaders and students continued to test the intake system. Tests utilizing a single roller intake have proved successful. Students added an elevated mount to mimic the path that the frisbees will have to travel in order to enter the robot. Tests in intaking multiple frisbees have proved successful and steps are being taken to improve on the design.

Intake with wooden stands
Programming
Driver Station
Students progress by printing messages from the robot to the driver’s station control board. The programmers worked on some code to allow the driver’s station to cycle thorugh different autonomous modes. The “Y” button on the Logitech F310 joystick was mapped such that while the robot is disabled, a driver station user message line would display the current autonomous mode. This ended up working quite well with the available commands the team had already: drive distance and wait.
Meanwhile, the team also took time to strip and crimp a five-wire encoder wire into two female PWM terminals. This would allow the programmers to plug the S5 encoders into the digital sidecar to test the team’s S5 encoders. Unfortunately, this has yet to be completed; testing will occur tomorrow to ensure that both the wiring and encoders work.
Writing the autonomous mode selector
CAD
Bumpers
Through diligent work by students the CAD for this year’s bumpers are nearly complete.
Drivebase
Students and mentors have continued to work in Solidworks to design our robot’s drivebase. Progress was made by adding electrical components to the CAD to map out the distribution of speed controllers, CRIO and pneumatic systems placement, and the power distribution board.
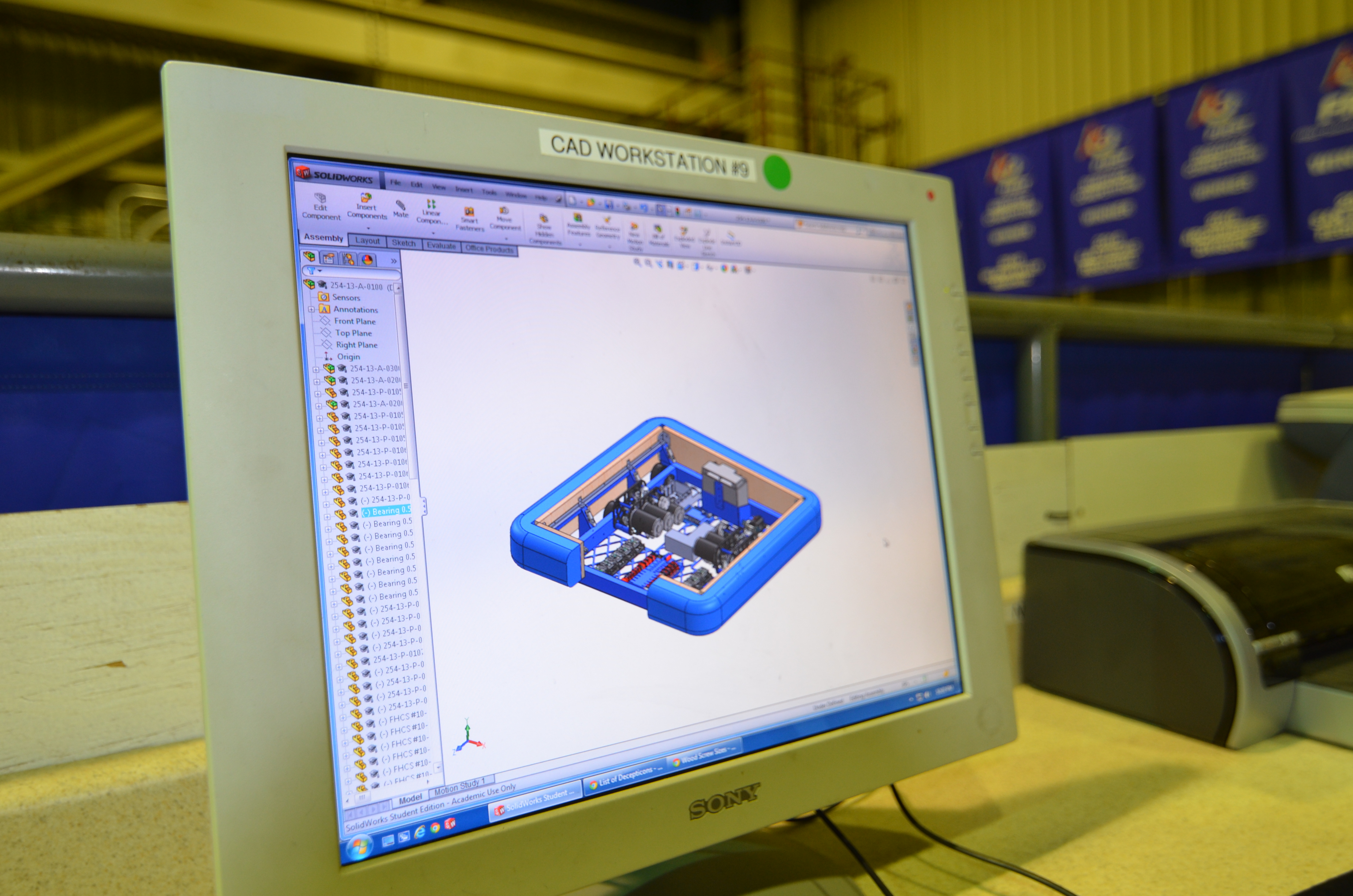
The design of the robot drivebase in Solidworks
Action Items
- Test S5 encoders
