
Blog - 2010
VEX Programming Session
Last week, October 26th was our first VEX Programming Session. If anyone hasn’t had the chance to write a sample program or to look at sample code, please do that so that we can move on in the sessions!
If you haven’t downloaded the trial for Robot C, follow the link and start programming:
http://www.robotc.net/download/vex/
If you have any questions, please email Zahi Hakim at [email protected] or Bhargava Manja at [email protected].
VEX Tournament: Tracy
Teams 254 A and 254 E are ready to take on the Tracy regional. 254 D is another potential Cheesy Poof team that would want to attend, but is awaiting confirmation from the Tracy director for an extra slot. 254 B, C, H, and S have opted out of the regional in order to get extra time to perfect their ideas before heading into a regional ill-advised.
254 A deploys a “sketchy” at best hanging mechanism accompanied by a claw that has the ability to score and descore.
254 E has avoided the infamous ladder for the time being to focus on their double sided robot. One side carries a simple spatula to descore while the opposite side of 254 E shows a rolling intake for scoring.
Both robots are tournament ready. There is a scheduled “pack-up hour” for Thursday after school in the Physic’s Lab to collect items such as tools and build material the teams may need for the regional.
San Jose Sharks Street Rally
Team 254’s T-Shirt Cannon made an appearance in San Jose today at a Street Rally for the San Jose Sharks, a professional hockey team. The Sharks play their first home game today against the Atlanta Thrashers and celebrated the occasion with a pre-game street rally.
The rally was a ton of fun and the robot was quite popular.
Technical Specifications
Features:
- Ten Barrel Revolver/Gatling Action
- Automatic Barrel Indexing
- Motorized Adjustable Pitch – Horizontal to +60 degrees
- Adjustable Range Control Via Electronic Solenoid Valve
- Six-Wheel Drive, Off-Road Capable Chassis
- Wireless Control
- Capable of launching 3+ T-Shirts per second
- Also Capable of launching racquetballs or hacky sacks
Technical Specifications:
General
- Dimensions: 28″ Wide, 38″ Long, 18″ Tall
- Weight: 160 Pounds
- Top Speed: 12+ Feet Per Second
- Capacity: 200+ Shots per Tank
- Projectile Range: 150+ Yards
Mechanical
- Qty 10 – 2.5″ OD, 2.375″ ID Barrels x 24″ Long
- Globe Motor Barrel Revolver Mechanism
- Van Door Motor Pitch Adjustment
- Pneumatic Cylinder Indexing/Lock
- Gas Spring Assisted Pitch
- High Pressure SCUBA Tank Reservoir at ~3300 psi
- Low Pressure Regulated SCUBA Tank Accumulator at ~120 psi
- 1″ NPT MAC Solenoid Valve at ~17.0 cV Flow Capacity with a 23 ms Response Time
- Norgren Low Pressure Regulator for Cylinder Indexing
- H2Oddysey Tank Mounted SCUBA Regulator
Electrical
- Power Source: 12 Volt, 17 AH SLA Motorcycle Battery
- Controller: VEX PIC Micro-controller with VEXNet
- Wireless Protocol: 802.11 g Wi-Fi @ 2.4 ghz
- VEX Pro Victor Speed Controllers
- VEX Pro Spike Relay Modules
- 12 Volt MAC Solenoid Valve for T-Shirt Launching
- 12 Volt Rexroth Solenoid Valve for Cylinder Indexing
About Shockwave

In Summer 2010, Team 254 decided to build a T-Shirt Shooting Robot to be used for promotional events. After two months of hard work, our robot debuted at a spirit rally at our school, Bellarmine College Prep in San Jose. The robot was received very well and was loved by the students at the rally.
Team 254 plans to use its T-Shirt Cannon Robot to promote the team and its sponsors. We will be bringing the cannon to team and school events as well as sponsor events.
For detailed information about the design and build process as well as the cannon’s technical specifications, please visit the following pages:
Bellarmine Spirit Rally
The T-Shirt Cannon made its debut tonight at the Bellarmine Spirit Rally. Set before the school’s football game against its rival, St. Francis of Mountain View, the rally aims to boost school spirit and morale before the game.
The T-Shirt Cannon came out in the middle of the rally and shot 30 T-Shirts at students stationed across the gym. The students aimed to catch the T-Shirts in trash cans in order to win spirit points.
The rally was a great success and the T-Shirt Cannon was a huge hit!
Robot Complete
After more than two months of hard work, Team 254’s T-Shirt Cannon is complete.
Today, we recieved the parts neccesary for us to fill our high-pressure SCUBA tank. After filling the tank, we tested the robot extensively to determine how many shots could be taken on a single air fill. On one air fill, the robot can shoot more than 200 shots, well above our initial estimates.
We are very pleased with how the robot turned out and look forward to using it to promote our team, our school, our sponsors and our community.
First Shots
The robot took its first shots today, shooting racquetballs. The robot shot extremely far, with distances yet to be officially measured.
For today’s shots, the robot’s tanks were filled by a shop compressor in the lab to approximately 100 psi. Early next week, we hope to start powering the shots off of the SCUBA tank.
Indexing & Tilting
After many days of work, the robot is almost complete. Today, we completed the indexing and tilting mechanisms and tested the robot in the lab without a projectile. The whole system seems to be working great.
Revolver Mounted
A ton of progress was made today on the robot. The valve block was tapped for the 1″ NPT hose. Furthermore, we were able to get the pivot shaft for the revolver completed so that we could mount the revolver on the base.
In the next few days, we hope to complete the indexing and tilting actions of the revolver.
Programming, Machining & More
Today, at the lab, we started programming the VEX controller on the robot. We finished the drive code and wrote simple code to open the main valve for a certain number of milliseconds when a button is pressed. Furthermore, the VEX controller was wired to the main robot power source after we confirmed with VEX that the controller will run off of 12V.
The main valve block is almost done with machining. All of the operations on the CNC Mill are complete and all that remains is tapping the pipe threads into the hole for the main hose, which will happen in the next few days.
Today, we got the main hoses in the mail as well as our scuba regulator. We hooked up the scuba regulator to the high pressure tank and found a 3/8″ UNC fitting that would connect to the regulator. We then connected it to the low pressure tank with the hose.
Wiring Complete
Today, we completed the wiring on the T-Shirt cannon. The large gauge wire and the signal wire was run successfully.
Furthermore, we tested the valve,shooting T-shirts and small balls on a test bed outside the lab to test the range of the robot.
Take Flight for Kids Demo
Team 254 and its robot, Devastator, had a great day at the 2010 Take Flight for Kids Festival. We had hundereds of visitors who all loved the robot. Some of the younger kids especially liked rolling the balls into the robot’s intake and letting the robot suck the balls up. We also had a large group of team members at the event, allowing us to manage the crowds and run the robot safely.
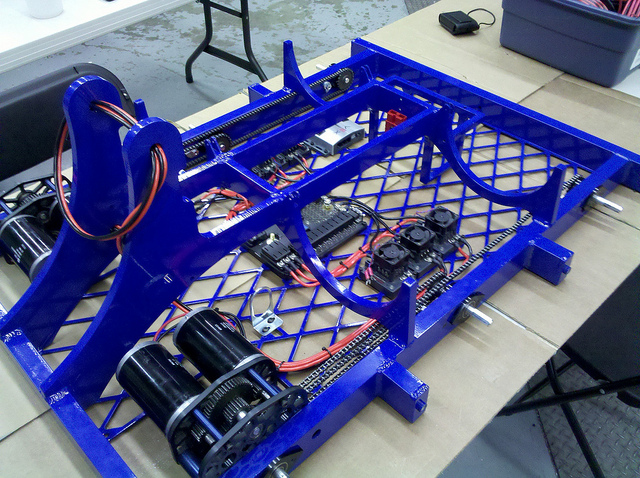
Powder Coated and Wiring Started
The robot returned from the powder coat shop today. The scuba tank also returned from hydrostatic certification after passing its tests. We hooked it up to a test bed and successfully tested the valve.
The machining on the valve block has begun and is coming along great. The block will be finished on Sunday.
Wiring on the robot began today. All of the electronics were mounted on the drivebase and many of the power wires were run. The large gauge power wires and the signal wires still need to be run.
Frame Welded
The T-Shirt Cannon’s frame has returned from welding. The frame was prepped for powder coating today and will be brought to the powder coat shop tomorrow.
The high-pressure scuba tank will be brought to Ace Fire Equipment & Services in East Palo Alto tomorrow to get its hydrostatic certification renewed so that it can be safely filled with high-pressure air.
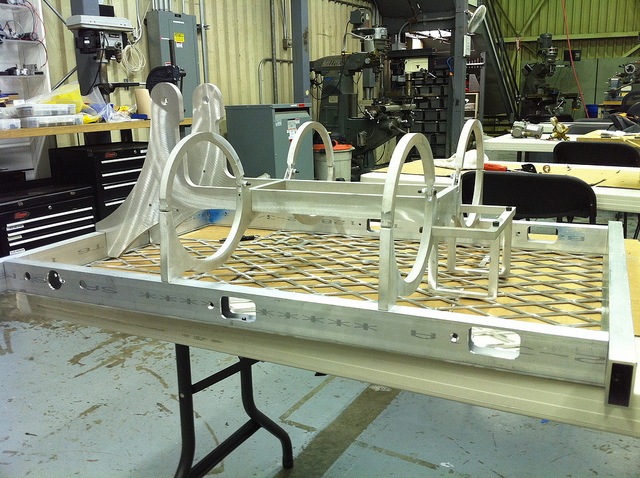
Frame Ready for Welding
After several days of hard work, the frame of the T-Shirt Cannon is ready to be welded. The framerails have been machined and riveted onto the baseplate. The superstructure frame has been pinned to the drivebase. Finally, the mounting blocks for the sideshields have been cut and a welding jig to hold them in place has been made.
The revolver plates have been machined and the tubes inserted between the plates. Once standoffs to go between the plates are machined, the assembly will be ready to weld.
We will hopefully get welding done early next week.
Frame Assembly
Today, we received our parts from BAE Systems, one of our sponsors who generously provided machining for this project. After bringing the parts to the lab, we started assembly. Furthermore, we cut the stock for the round barrels and began to assemble the revolver assembly, which will be welded next week.
Metal Arrives
The metal arrived at school today and we delivered the aluminum plate to BAE Systems, one of our sponsors. BAE has generously offered to provide waterjet cutting for our project. The parts are expected to get cut on Monday.
Meanwhile, at the lab, machining has started on the chassis rails. They are expected to be complete by next Thursday.
Ordering Material
Today, we compiled the master list of the material that we need to purchase for the robot. We already have some of the metal at the lab but most needs to be purchased.
After the list was completed, we ordered material which is expected to arrive on Friday.
Final Design
Today, we were able to bring all of the parts of the design together into one completed robot design.
We will be taking a short break from the build of the robot as school starts up again and will resume again during the first week of September.
