
Blog Archive
VEX World Championship
Overview
This past week, 15 members of Bellarmine’s VEX Robotics Team 254 competed at the VEX World Championship. Team 254D \(led by Elias Wu ’14, Tyler Cuff ’14, Jeffrey Kaufman ‘15, and Tarun Midde ’15\) ranked 7th in it’s division, and Team 254G \(led by Eric Wang ’17 and Goutham Gnanasekaran ’14\) ranked 22nd in it’s division after the qualification matches. Both made it to the Elimination matches as part of the 6th alliance \(out of 8 alliances\) in their respective divisions. Although the odds were against them, both made it to the finals of their respective divisions. Because of the structure of the competition, both always faced alliances that were ranked higher, and yet managed to make it to the finals. Both even won one of the three finals matches. Team 254D won the overall Website award, and Team 254G won the Teamwork award in their division.
Qualification Matches
After intense qualification matches in the Technology Division, 254G ended with a 6-4-0 record and a 22nd rank. 254G started out strong with three consecutive wins against opposing alliances on Thursday. However, matches after that were much more difficult. 254G would then go on to lose two matches in a row Friday morning, but was able to maintain a winning record through Saturday to finish with a 22 rank in the division. 254G also won the Teamwork Award in the Technology Division, which was a pleasant surprise for the team after their tough matches.
Team 254D also had a series of challenging qualification matches in the Science Division. They began on Thursday with several difficult matches caused by tough opponents and unlucky alliances. Nevertheless, 254D rebounded in the qualification matches on Friday and Saturday to end up with a 7-2-1 record, ranked 7th in the division.
Elimination Matches
In the Technology Division, 254G allied with sixth seed 7232C and ninth seed 2213D for the eliminations matches. Despite being one of the lower ranked alliances, they made it all the way to the finals in their division. All of our rounds in division eliminations were difficult, with every one of them going to a third tiebreaker match. The first round ended in a tiebreaker match against an alliance led by third seed 1893B. 254G’s alliance won by just 2 points in that match with a final score of 42-44. Next, they faced the alliance led by 1575D which also ended in a tiebreaker match. However, this one was way more intense. After what seemed like a crushing loss for our alliance, the score was revealed to show that the opposing alliance had suffered a disqualification. The final score of the match was 9-0, with 7232C, 2213D, and 254G advancing to the finals. Our alliance lost the first match by a score of 45-34 to 169E’s alliance, but we were able to rebound and win the next match by a score of 52-32. Finally, 254G and 2213D competed in the last match of the final round. Our opponents won autonomous and were able to defend the goal zone successfully. The final score of the match was 43-30, in favor of 169E’s alliance. 169E, 1460J, and 136M advanced to the Round Robin. Overall, this was a very successful year for 254G and we hope to experience similar success in the future.
During alliance selection, 254D was bumped up to the 6th seed. They declined an alliance with the 3rd seed team, 5139A, instead choosing to captain their own alliance with teams 2941D and 2880A. They went on to face the 3rd seed alliance in the quarterfinals. After losing by a huge margin of 82-4 in the first match as a result of tipping during the autonomous, 254D and its partners went on to beat the 3rd seed alliance, made up of 5139A, 800B, and 4194F, in two consecutive matches. In the semifinals, 254D competed against the 2nd seed alliance, captained by Team 26, along with 231A and 9090A. They defeated the opponents in the first two matches through a combination of a successful autonomous, strong defense, and by changing game strategy with their partners each match. Then, as the 6th seed alliance, 254D went up against their biggest challenge in facing the 1st seed alliance in the division finals. Team 1136A led the opposing alliance with teams 1961C and 6135B. Unfortunately, after playing in every single one of the previous elimination matches, 254D’s robot suffered motor and cortex difficulties in the finals. They lost the first match, won the second, and ultimately lost a tense final match. While this was a disappointing loss for 254D, they nevertheless performed extremely well against highly difficult odds, and they are proud of their accomplishments.
After Competition
After a great season, the members of Team 254 enjoyed the traditional evening of fun at Dave & Buster’s. In surprising turn of luck, they collectively managed to score a series of jackpots, pooling their winnings to buy a cheap remote\-controlled helicopter (unfortunately, D&B lacked quality yo-yos). After returning to the hotel, Team 254 had fun playing with their new toy. Overall, this year’s VEX World Championship was a memorable experience for Team 254.

Day 23: Manufacturing, Ordering, Goal Construction, Lab stuff, CAD
By Clay Rosenthal
Manufacturing:
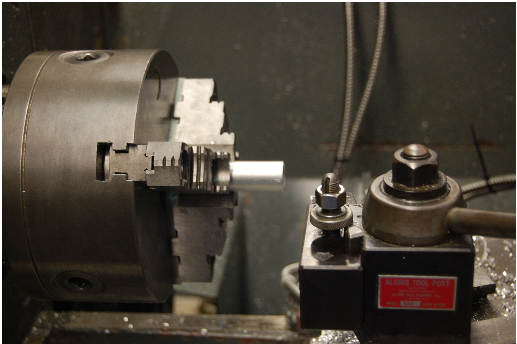
Lots of parts were manufactured today. The gussets for the superstructure were machined on the CNC and scotch brited by hand. Axle plugs were turned on the lathe. Pieces to be CNC milled later for the intake and the hood were cut on the horizontal band saw. Axles for the rollers were cut on the horizontal band saw as well. We also began programming the CNC to make the plugs that hold the superstructure subassemblies together.




Lab Maintenence
The manual mill’s starting motor is burnt out so it won’t work for now. Repairs were made throughout the day but it still doesn’t work. New parts need to be ordered for it. The CNC mill was leaking coolant today for an unknown reason. It will be looked into later in the week and fixed. The projector upstairs was mounted above the screen so it is no longer on the table.



Ordering:
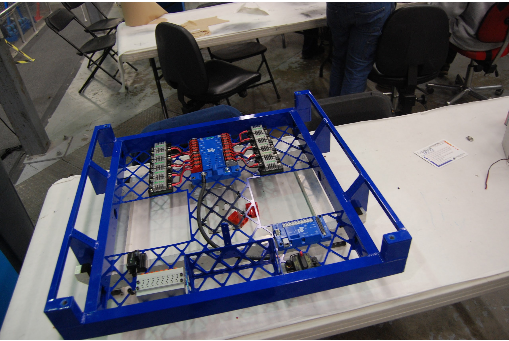
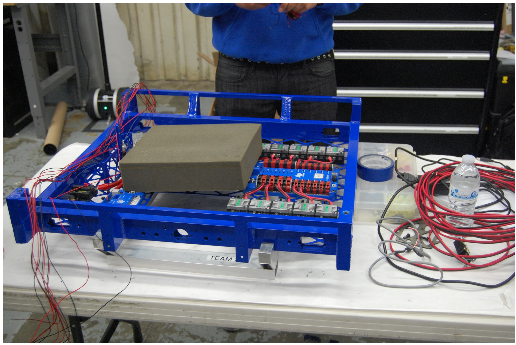
Today we ordered many parts. Specifically we ordered the wiring supplies and the electronics to **finish the robot drive by Friday.**
Field Construction
The wood covering the driver station finally broke after the repeated impact of balls landing in the goal. Modeled after the official field, PVC pipes were laid across other pipes to provide the same protection with less material. The PVC was attached to the goal and the I\-beam on the front wall of the lab. The zip ties may be replaced by something more sturdy.

Action Items
- Check trello
- When the electronics arrive, wire robot. Ask Mani or Torrance.
- CAD needs to be worked on and finalized, ask Mani or EJ.
- Manufacture more parts for robot.
- Make gearboxes to have the robot base drive by Friday.
Day 3: Prototyping continued, Autonomous strategies, and more
Autonomous Strategy
Today, we discussed scoring all three balls in autonomous. In autonomous, only the area directly in front of the low goal is guaranteed to be undefended. The strategy would involve starting with one ball in the robot, one in front and one behind. The robot would immediately drop an intake on each side of the robot and drive to the hot goal to score, dragging the balls with it. We also discovered that a banner sensor was able to pick up the reflective tape, meaning that the robot wouldn’t need to a camera to detect the hot zones.
We discussed whether it was more beneficial to shoot from afar or really close to the goal. Several team members proposed that shooting 2-4 feet away would be best since it would more than likely increase the robot’s accuracy. The fly wheel shooter was set up about 3-4 feet away from the goal and was able to successfully score
Catapult Prototype

A group today worked on a catapult prototype. A good amount of progress was made and it seems to be coming along well. The only things left to add are the rope, springs and hard stops.
Ball Catcher
Some of the students worked on a basic catcher prototype, making it from PVC pipe. They added a funnel to the top to increase the likelihood of the ball going in. It worked out well with some minor strengthening.
Programming
The programming team worked on a basic autonomous runner that uses threading. In essence, it allows for commands to be run while still allowing evaluation to occur. Also, in the event that a command should fail or timeout, the robot will skip the rest of the commands. One of the ideas that was brought up was separate compilation for the main code and autonomous routine to allow for quick changes to the autonomous without having to recompile the whole codebase.
Sponsor Visits
Over the past three days, Team 254 has had the opportunity to visit two of its Gold level sponsors, BAE Systems and Ooyala, and demonstrate the fruits of its labor.
Richard Lin speaking to an Ooyala Employee

Overkill fully extended showing off its hanging capabilities

Students demoing Overkill
BAE Visit
On June 5, a multicultural group of five students and one mentor celebrated diversity with BAE at the BAE Systems Diversity Fair. The students participating were Nagy Hakim, Scott Cardona, Richard Lin, Abhi Kumar, and Louis Lin. Mentor Dennis Jenks provided Team 254 with the amazing opportunity to come to the fair. People in the event included many BAE engineers and programmers, who added excitement because students had a chance to talk to others who work in the same fields of interest.
Students transported two robots, Overkill and Shockwave, to the event to exhibit the team’s work and extend appreciation for BAE’s consistent support throughout the years. Many of their employees came out to visit the team’s pit and talk about the robots’ designs and controls. After opening ceremonies, Shockwave fired a barrage of T-shirts into a crowd. Later, drivers and operators demonstrated Overkill’s driving and frisbee shooting capabilities.
At the conclusion of the fair, Dennis led the students on a private tour around BAE’s impressive facility. Four tour guides exhibited the workings of BAE, including military vehicles, machines, simulations, and controls.
Ooyala Visit
Today, the team visited one of our Gold level sponsors, Ooyala. Our programming mentor Patrick Fairbank, who works at Ooyala, set the day up so the team could demo Overkill. The team visited their office, located in Mountain view and set up. There were about 40 or so members of the company that gathered around asking questions about the various subsystems and function of the robot.
Many members of the company also played Ultimate Frisbee after work on a team. These members lined up on one end of the space set up while Abhi Kumar and Richard Lin drove the robot around, picking up and shooting frisbees towards the employees(At a much lower, catchable speed). Meanwhile, Nagy Hakim answered questions about the robot. At the end of the demo the team members stuck around for pizza and presented the award to Patrick for Ooyala’s sponsorship.
Team 254 thanks BAE Systems and Ooyala for their continued support in the robotics program.
