
Blog Archive
Toys for Tots 2014
This Sunday, Team 254 went to the Toys for Tots event at the Santa Clara County Fairgrounds. Toys for Tots is an organization founded by the United States Marine Corps Reserve and it aims to deliver, through a new toy at Christmas, a message of hope to less fortunate youngsters that will assist them in becoming responsible, productive, patriotic citizens. This event was sponsored by BAE Systems, one of our long time sponsors. The team demoed our 2014 Robot Barrage to enthusiastic kids and parents and also helped with the toy distribution. Some team members joined in the festivities by getting their faces painted with Christmas themed items and also the team swoosh. Also attending the event was Team 604, Quixsilver and several FTC and FLL teams, showing off their robots. Overall, this event was super fun and we look forward to helping out next year.

2014 Build Blog Release
Barrage Build Blog
Team 254 is proud to release its 2014 Season Build Blog. This year’s release contains day by day updates along with in-depth discussions into strategies, prototypes, build decisions, and other Team 254 projects.
Technical Binder
For technical discussion along with detailed pictures on various robot systems please refer to the 2014 Barrage Technical Binder.
Software Release
Our robot ran Java this year as it did in 2013. To develop Barrage, we added a bunch of new features like waypoint navigation that drives smooth splines, an internal web server for debugging controllers and modifying robot constants, Cheesy Vision, single threaded autonomous scripting, and more. Check it out!
Day 22: Trussing and Wiring
Trussing
Several students worked on building the trussing for the field. They started with 1.5 x 1.5 inch wood struts and spent all day constructing the various portions of the truss. They are on track to complete the main trussing framework tomorrow.
Wiring
A couple of students began working on wiring the robot. Specifically they worked on wiring the Talon speed controllers to the Power Distribution Board \(PDB\). They cut, crimped and soldered wires and have completed most of the wiring for the speed controllers
Clapper Popper
The “Clapper Popper” is the prototype indexer for the ball. It uses a scissor lift mechanism to push the ball up into the flywheel in order to shoot. Students retrofitted the old popper with four pistons instead of two. This helped improve the stability by evenly distributing the force of the pistons across each side. This led to less skew when the pistons were fully extended.
Brogramming
The brogrammers worked on the following:
- Getting the drive controller to turn arcs
- Add heading and scaling to the trajectory
- Fix the distance controller
- Fixing bugs and cleaning up the Drive Controller
- Adding the Hold Position Controller
- Finalizing the Data Logger
Design
We are continuing detailed design on the robot. For example, today we worked to finalizing the superstructure in addition to working on the front intake. We created part drawings for the front intake so machining can begin on these parts. Furthermore, we worked on cleaning up the rough edges of the CAD model and inserting details such as holes and other parts.
Graphic Design
The Media team worked on designing new t shirts, hats, sweatshirts, phone cases, and sunglasses for this next year.
Students came up with 3 early drafts incorporating the elements of Aerial Assist into the design elements. The phone case design is completed and students are continuing work on both the t shirt and the sweatshirt tomorrow
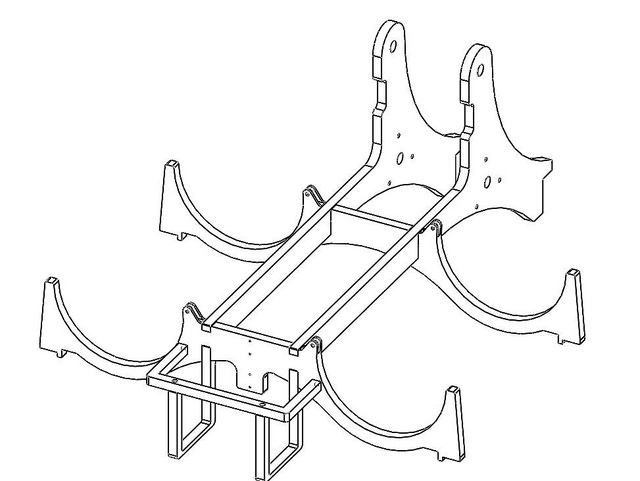
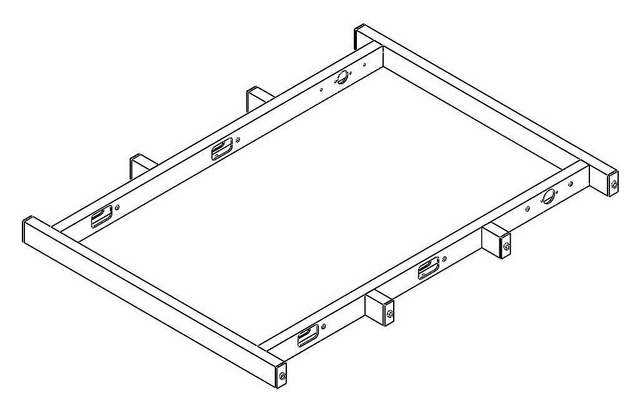
Superstructure Design
Today, we went through and designed the superstructure frame that would hold the robot together. We started by looking at our objectives for the superstructure:
- The superstructure needs to support the revolver and the valve block.
- The superstructure needs to support the SCUBA tanks.
- The superstructure should hold the battery.
We took our design objectives and decided that building a frame out of 1/2″ aluminum plate would allow us to build a very strong and light frame. We designed several interlocking 1/2″ aluminum plates which will be welded to form the superstructure chassis. The frame will contain cradles to contain the SCUBA tanks as well as bars that will close down on top of the tanks to lock them in place.
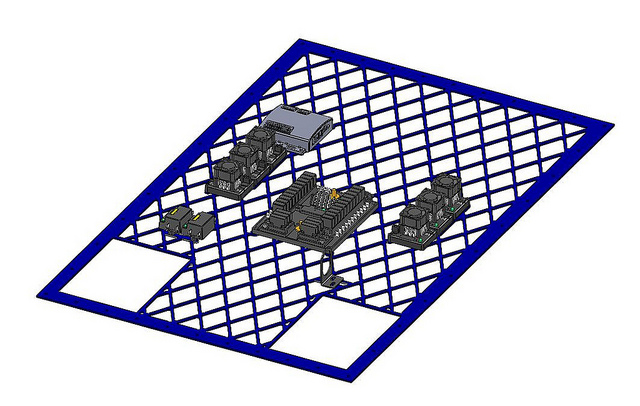
Electronics Board Layout
Today, we focused on the design of the electronics board, trying to get the board finalized. We spent some time physically laying out the electronics, trying to find the best configuration to optimize our wire paths. Also, we worked extensively on the design of the baseplate to which the electronics mount, finishing its design.
All of the electronics for this robot are made by VEX Robotics, taken from both the VEX Design System and the VEXPro line.
 >
>
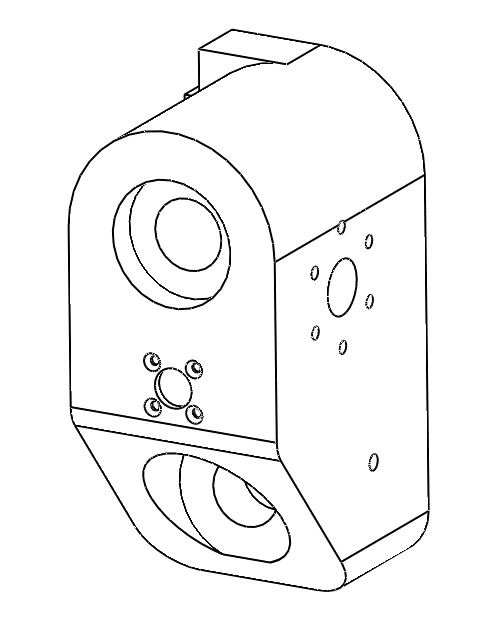
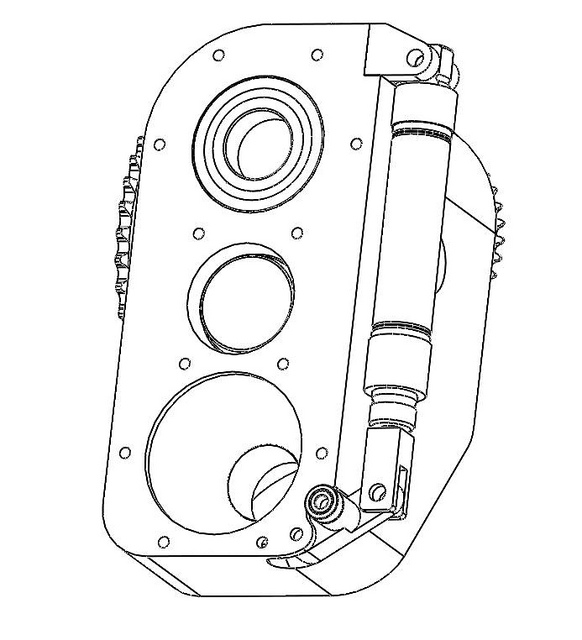
Valve Block Design
The design for the T-Shirt Cannon is coming along great. Today, one group of students started working on a preliminary version of the baseplate that will be used to mount the robot’s electronics.
Another group of students continued to work on the robot’s superstructure, starting to design a block that will serve as the mounting point for the revolver as well as the interface between the air hose and the revolver. Part of this endeavor was to design an indexing mechanism. The mechanism envisioned will have a lever with a bearing on the end that will roll into a slot on the revolver to lock it in place.
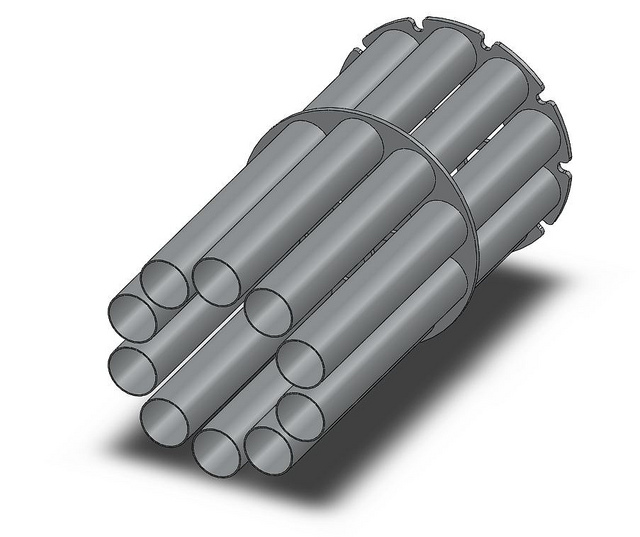
Chassis & Revolver Design
The design for the drivebase is coming along great. The frame members are mostly modeled and we have started to create the baseplate to which the electronics will mount.
Today, a separate team broke away from the drivetrain team and started to model the superstructure. We started with the revolver, modeling a ten-barreled revolver with ten aluminum tube barrels connected with two aluminum plates. The assembly will be welded.
Design
Today, we continued to work on the conceptual design of the robot. Some ideas we had:
- It is necessary for the robot to be relatively narrow (<30″) so that it can fit through a standard doorway. We do not have any real restrictions on the length and height of the robot, but to keep it relatively manageable, we intend to keep it under 42″ long.
- If we moved the drive gearboxes from the center wheels to the back wheels, we could potentially move the scuba tanks lower to the ground and make the whole robot more compact.
Research & Conceptual Design
Today, we started to wrap up the research phase of our project. Some stuff we have learned:
- We found a valve that seems to meet our needs and is in our price range. We plan to move forward with the purchase of this valve. The valve is manufactured by MAC Valves.
- Finding a regulator to regulate the 3000psi air from the scuba tank to working pressure could be expensive.
- We decided that indexing the barrels to line up with the hose will be difficult. We are not sure if a seal will be needed at this connection and we think that it will be important that the revolver is locked in place before the robot shoots. To accomplish this, we will need some sort of indexing mechanism. It seems that indexing will be easier with the revolver than with the linear magazine, so we will start looking more seriously at the revolver.
- We could manufacture a block to interface between the hose (coming from the scuba tank) and the barrels.
- If we place the two SCUBA tanks flat directly above the drivebase, we will be able to keep the robot compact and low to the ground.
Research Progress
Today, we discussed some of the results of our research and started to talk about general design. Some of the things we have learned through our research are as follows:
- To shoot multiple T-Shirts, the best solution seems to be having multiple barrels rather than trying to build a mechanism to reload a single barrel.
- High speed solenoid valves are expensive and it will be difficult to find one that will fit our requirements while staying in our price range.
- Every robot we’ve seen that launches T-Shirts from multiple barrels has one valve on each barrel. We’d like to try to avoid this to cut down on cost.
- Many T-Shirt shooting robots we’ve seen in the past have used PVC piping and/or PVC sprinkler valves. PVC is not rated for pressurized gas and is extremely dangerous when used for gas storage.
- SCUBA tanks seem to be a relatively easy method of air storage. They can safely hold extremely high pressure air and can be filled inexpensively at many SCUBA stores.
- If we can re-use some of the drivetrain parts from past robots, we can save money and reduce the cost of the project.
- The two choices for barrel design seem to be either a rotating revolver or a linear magazine.
- If the robot has large wheels, it may be easier to traverse large obstacles.
Design Objectives & Research Tasks
Today, we met to determine our design objectives for the robot.
- The robot should be mobile, able to drive around obstacles and aim.
- The robot should be able to shoot different distances.
- The robot should be able to make many shots without reloading.
- The robot should be able to hold multiple T-Shirts and shoot several rapidly.
- The robot should be visually appealing so that it can represent our team and our sponsors positively.
- The robot should be able to be transported easily to a number of events.
- The robot should be safe to operate.
After we decided on objectives, we moved forward to discuss items that would need to be researched before we could move into the design phase of the project.
- We need to research Solenoid Valves, ideally with quick response times and high flow rates.
- We need to research the cost of manufacturing a metal chassis.
- We need to research some of the problems and failures faced by previous T-Shirt cannons.
- We need to research some of the safety precautions and regulations necessary for building a T-Shirt launching robot.
- We need to research methods of preparing T-Shirts for launch.
- We need to research methods of air storage.
- We need to research and brainstorm possible general robot designs.
Initial Project Concept and Goals
After deciding that our team wanted to undertake a summer project to build a promotional robot, we came up with a multitude of suggestions for what to build. After careful consideration, we decided that a high-powered T-Shirt launcher would be the best robot for promoting our team, Bellarmine and our sponsors.
In addition to serving as a promotional robot, this project will help to train new team members on robot building skills and techniques so that we can be more prepared for the robot build season during the school year.
The build process will be beginning near the end of the month and we will work through August, possibly going into the first month of the school year.
