
FIRST Robotics Blog
2022 FRC World Champions
A Brief Summary
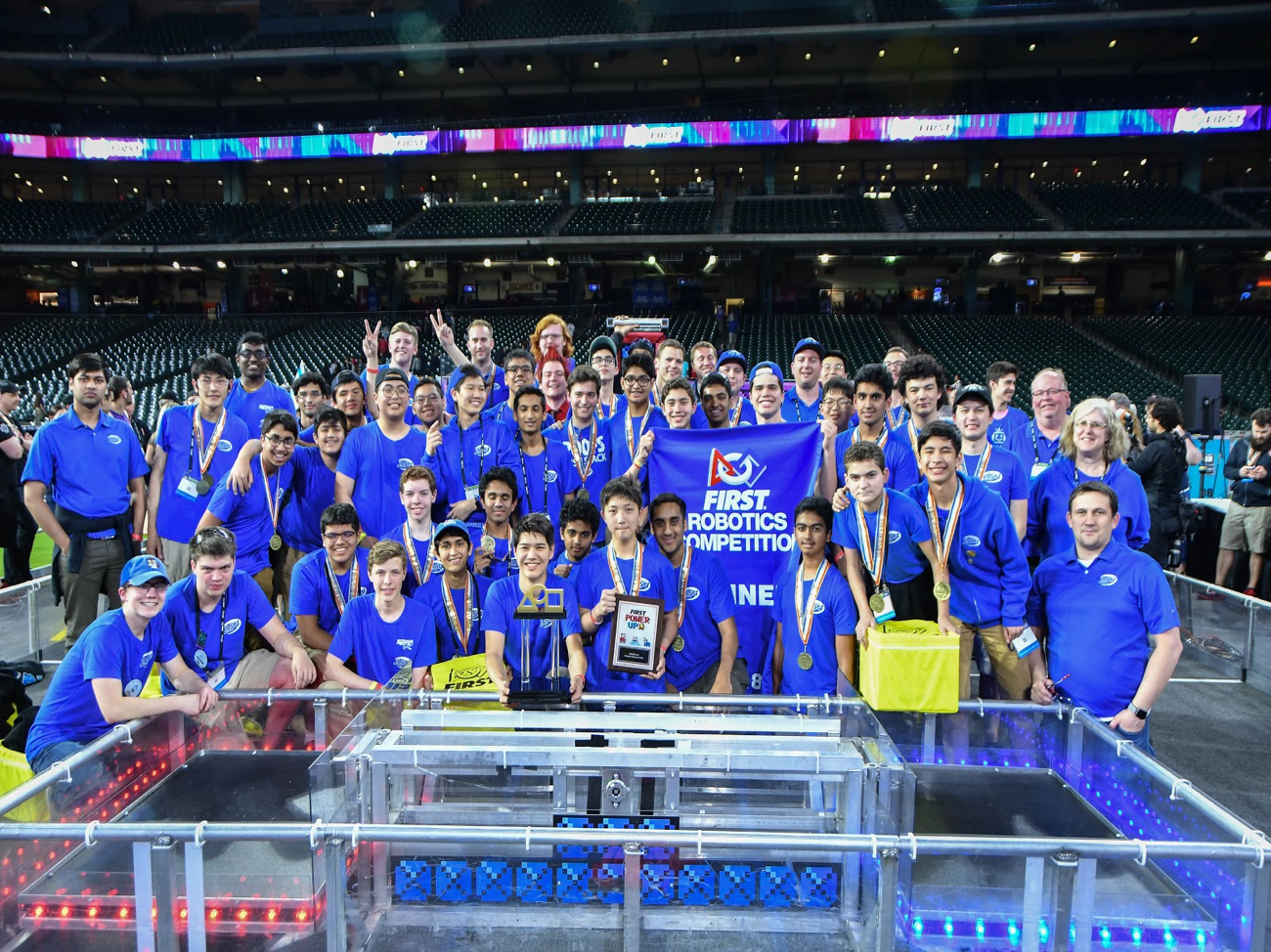
As part of an eventful week, we attend the 2022 FIRST World Championship in Houston, Texas from April 20th to April 23rd. After qualification matches in the Galileo Division we accepted an invitation to play in the playoff rounds alongside the #1 seed Team 1619 Up-A-Creek Robotics, along with Team 3175 Knight Vision, and Team 6672 Fusion Corps. Our alliance was able to win the Galileo Division and advance to the Einstein field to face the other five division winners, where we ultimately won our fifth World Championship!
 Team 254 poses for a picture after winning at the 2022 FIRST Championship
Team 254 poses for a picture after winning at the 2022 FIRST Championship
Robot Performance
Qualification Matches (Galileo Division)
Throughout our qualification matches, we wanted to make sure that we secured four ranking points during each match. In order to do this, we tried to win the match, shoot at least 20 balls in the upper hub, and have an alliance partner climb with us. Through the efforts of our drive team and pit crew, our robot performed admirably each match. We achieved a 8-1-1 record, and a ranking point average of 3.60, with a rank of 4th out of 76.
 Sideways hangs with other alliance partners at the end of a qualification match
Sideways hangs with other alliance partners at the end of a qualification match
Alliance Selection
Going into the playoff tournament in the Galileo Division, Team 1619 Up-A-Creek Robotics, the #1 seed, invited us to their alliance, along with FRC Team 3175 Knight Vision and FRC Team 6672 Fusion Corps.
Playoff Matches (Galileo Division)
From a strategic perspective, our alliance wanted the ability for all three robots to contribute offensively and defensively. We also wanted to have a triple traversal climb, to give our alliance more strategic flexibility and higher points ceiling. We were very lucky to be with three amazing teams that complemented each other perfectly.
On the Einstein Field
Our alliance modified our strategy during the Einstein matches, with Team 6672 playing more of a defensive role against the opposing alliance. Each of our three robots also attempted to climb to the traversal rung during the endgame, knowing that the first tiebreaker after wins was average Hangar points. Our performance allowed us to move on to the finals, facing the Turing Division winners. In the finals, our alliance won the first match by a single point and then lost the second match. In the tiebreaker match, our alliance’s strategists opted to swap out Team 6672 for Team 3175 to attempt a different defensive strategy that would allow us to control two opponent balls to help starve our opponents, and changed our offensive approach to try and avoid the very effective defense played by Team 4099 against us in the previous matches. Thanks to this new strategy and to our autonomous mode working better than previously, we were able to win the finals tiebreaker. We would like to shout out Team 1577 Steampunk, Team 4414 HighTide, Team 2539 Krypton Cougars, and Team 4099 The Falcons, for having an amazing alliance. Our alliance was very fortunate to emerge victorious after three incredibly tough and competitive matches.
A Special Thanks
At the 2022 FIRST World Championship in Houston, we would not have been able to be so successful without the amazing teams that we were able to work with during our matches. Also a special shout out to our pit crew and drive team for properly maintaining our robot during the tournament. We would also like to highlight the efforts of our alliance readiness crew to keep our alliance partners ready throughout the tournament. Team 254 would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, teachers, and parents who supported us and helped us succeed.
 Members of the Team 254, 1619, 6672, and 3175 wait for their next match on the Einstein Field
Members of the Team 254, 1619, 6672, and 3175 wait for their next match on the Einstein Field
 Our drive team poses for a picture on the Einstein Field after the last match
Our drive team poses for a picture on the Einstein Field after the last match
Silicon Valley Regional Champions
A Brief Summary
As part of an eventful weekend we attended the 2022 Silicon Valley Regional in San Jose, CA. We had a great time at our second tournament of the FIRST Rapid React Season with our robot, Sideways. Alongside FRC Team 1678 Citrus Circuits and FRC Team 7419 QLS Tech Support, we were able to win the tournament, along with taking home the Quality Award!
 Team 254 and alliance partners Team 1678 and Team 7419 pose for a picture with Sideways after winning at the 2022 Silicon Valley Regional
Team 254 and alliance partners Team 1678 and Team 7419 pose for a picture with Sideways after winning at the 2022 Silicon Valley Regional
Robot Performance
Qualification Matches
In the qualification matches, we executed a strategy to earn all four ranking points by winning the match, scoring at least 20 balls in the upper hub, and climbing to the traversal rung. Through the tireless efforts of both our alliance partners and our own team members, we achieved a 9-0-0 record, and a perfect ranking point average of 4.00!
 Sideways hangs, with an alliance partner, at the end of a qualification match
Sideways hangs, with an alliance partner, at the end of a qualification match
Alliance Selection
 Team 254 representative, Nikhil Gangaram, stands with Team 1678 and Team 7419 as they agree to join our alliance
Team 254 representative, Nikhil Gangaram, stands with Team 1678 and Team 7419 as they agree to join our alliance
Going into the playoff tournament, we were excited to be able to form an alliance with FRC Team 1678 Citrus Circuits and FRC Team 7419 QLS Tech Support.
Playoff Matches
During the playoffs, we employed a strategy that involved our robot and Team 1678’s robot to be on opposite sides of the field, so we didn’t cross paths and bump into each other. This strategy maximized our total cargo collected and shot. We knew that balls would get stuck behind the hub, so Team 7419 swept the backside of the field while playing defense on the opposing alliance’s robots. Just before the endgame started, Team 7419 started to climb, in an attempt to get all three robots on the traversal rung.
 Team 254, and alliance partners Team 1678 and Team 7419, hang on the Traversal Rung at the end of a playoff match
Team 254, and alliance partners Team 1678 and Team 7419, hang on the Traversal Rung at the end of a playoff match
A Special Thanks
At the Silicon Valley Regional, we would not have been able to be so successful without the amazing teams that we were able to work with during our qualification and playoff matches. Also a special thanks for our pit crew and drive team for properly maintaining our robot during the tournament. A big thank you to the Chairman’s Award team for presenting our submission in front of a panel of FIRST Judges. Team 254 would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, who helped us succeed in this regional.
 Members of Team 254 Pit Crew repair Sideways before an upcoming playoff match
Members of Team 254 Pit Crew repair Sideways before an upcoming playoff match
 Drive team members of Team 254, 1678 and 7419 strategize before an upcoming playoff match
Drive team members of Team 254, 1678 and 7419 strategize before an upcoming playoff match
 Team 254 President, Nikhil Gangaram, and mentor, Joey Diamond, assist a team before an upcoming match
Team 254 President, Nikhil Gangaram, and mentor, Joey Diamond, assist a team before an upcoming match
Sacramento Regional Champions!
A Brief Summary
As part of an eventful weekend, we attend the Sacramento Regional in Davis, CA! We had a great time at our first season tournament after two long years. Alongside FRC Team 1678 Citrus Circuits, Team 5458 Digital Minds, we were able to win the tournament!
Robot Performance
Qualification Matches
Through our qualification matches, Sideways performed very well. Despite bearing one loss, going 10-1 overall, we were able to score an average of about 118 points with our alliance partners per match. According to our scouts, we scored an average of 79.5 points, in most of our qualification matches. We sought to earn the maximum number of ranking points, which meant getting an alliance partner to climb, and shooting at least 20 balls into the upper hub, which would get us to 2 RP. To get the final two ranking points, we had to win the match. Through this strategy, we set a world record of 177 points in our first match. At the end, we were the first seeded alliance heading into elimination matches.
Alliance Selection
Going into the elimination period, we chose to form an alliance with FRC Team 1678 Citrus Circuits, and FRC Team 5458 Digital Minds.
Elimination Matches
For elimination matches, we aimed to focus on shooting cargo and climbing as much as possible, hoping to get 20+ balls in the upper hub, and to have at least two robots on the traversal rung. Alongside our alliance partners, we were able to execute this plan well, even breaking our own world record with 180 points in a semifinals match. Our streak continued as we went on to win our finals matches against Team 973, 7157, and 5274, winning the tournament.
A Special Thanks
Also, a special shoutout to our pit crew and drive team for properly maintaining our robot, and our alliance readiness crew, who supported other teams throughout the tournament. Team 254 would also like to thank all the volunteers and judges that made this tournament possible, and all of our mentors, teachers and parents who supported us and helped us succeed!
Team 254 Presents: Dreadnought
Team 254 presents our 2020 entry into the FIRST Robotics Competition: Dreadnought. Dreadnought will be competing at the Central Valley Regional, followed by the Silicon Valley Regional and the FIRST Championship in Houston. More information on the robot.

Madtown Throwdown Offseason Tournament
A Brief Summary
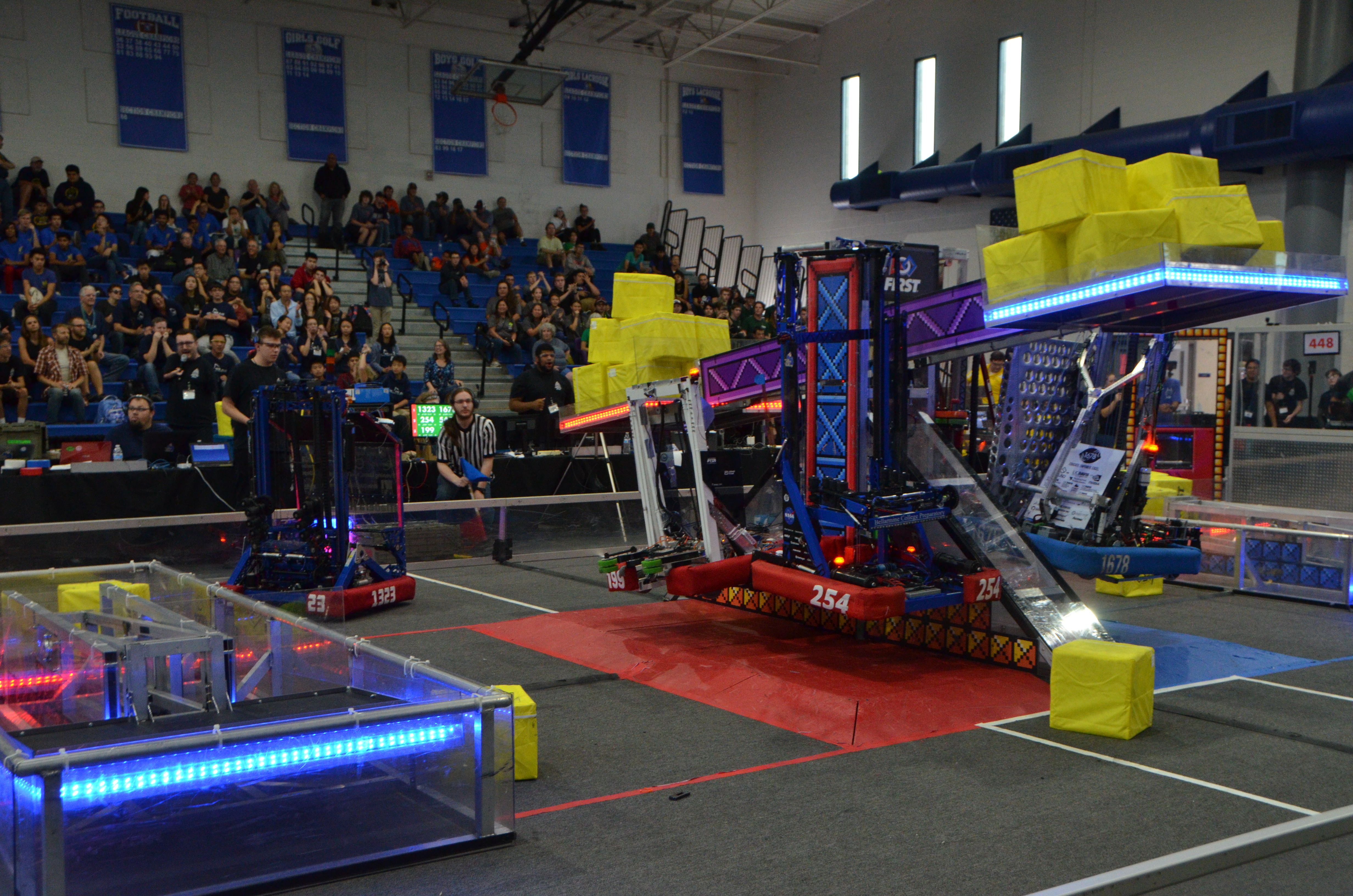
This past weekend, we attended Madtown Throwdown, an annually hosted offseason tournament hosted by Team 1323 (Madtown Robotics), in Madera, CA. We had a great time jumping back into action with our robot, Backlash, before the start of the 2020 FRC Season. Shoutout to FRC Team 1323 MadTown Robotics, FRC Team 1678 Citrus Circuits, and FRC Team 971 Spartan Robotics, for winning the tournament!

Team 254’s Backlash and Swerve Bot in an alliance together before an upcoming match
Event Summary and Highlights
Robot Performance (Backlash)
Backlash approaching the HAB zone for a climb before the end of a match
Throughout our qualification matches, we sought to earn the maximum number of ranking points, which meant prioritizing scoring in the rocket in every match to get the rocket RP, as well as climbing and scoring enough points to win. We employed a new rocket RP scoring style that allowed us to utilize our partners well. Since the opposing defense was much better at Chezy Champs, we focused on the top two levels of the rocket and let our partners score on the first level. The HAB RP was a bit harder because of the increased point requirement. Thus, we made sure to always climb successfully and also get our partners to park on the platform. We consistently scored double climbs in our matches.
By the elimination period, we focused on simply winning our matches. We scored as many points as possible by scoring as many cargo balls as possible since they were worth more than hatches. We wanted to score enough hatches such that we had multiple points to score at any moment and avoid getting caught up by defense. We ran our cargo ship autonomous program to place hatch panels on the first two side slots of the cargo ship and then filled the rocket during most of our matches. Sometimes, we switched between the task of scoring hatches and cargo with our alliance partners to confuse defensive opponents.
Alliance Selection (Backlash)
Going into the elimination period, we formed an alliance with Team 1323 MadTown Robotics, Team 4698 Raider Robotics, and Team 6174 Kaprekar’s Constants.

Team 254 representative, Garrett Blosen, poses with our chosen alliance partners
Robot Performance (Swerve Bot)
Our swerve bot on the HAB zone before an upcoming match
With our swerve bot, we had no vision which made alignment quite difficult. Due to our alignment issues, hatch panel placement was harder to accomplish. Instead, we tried to focus more on scoring cargo, in all levels of the rocket and in the cargo ship. However, hatches on level one of the rocket and on the cargo ship were easier to score because we had our camera. We also placed hatches on level one of the rocket to open scoring locations. Then, we scored cargo in on level one of the rocket as well. Our swerve bot also was able to climb onto level three of the HAV with the suction cup climber, so we used that to get us the climb bonus during matches.
Alliance Selection (Swerve Bot)
Going into the elimination period, we formed an alliance with Team 1662 Raptor-Force Engineering, Team 5104 BreakerBots, and Team 2135 Presentation Invasion.

Team 254 representative, Emiliano Hansen, poses with our chosen alliance partners
A Special Thanks
At Madtown, we would not have been able to be so successful without the amazing teams that we were able to work with during our matches. Also a special shout out to our pit crew and drive team for properly maintaining our robot during the tournament. We would also like to highlight the efforts of our alliance readiness crew to keep our alliance partners ready throughout the tournament. Team 254 would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, teachers, and parents who supported us and helped us succeed in this tournament. Special shoutout to Team 1323 MadTown Robotics for making this event possible.

The Team 254 pit crew in action

254 member, Safwaan Khan, in action as a pit crew member
Chezy Champs 2019
A Brief Summary
As part of an eventful weekend, we hosted Chezy Champs, our annually hosted offseason tournament at Bellarmine College Preparatory, in our hometown of San Jose, CA. We had a great time jumping back into action with our robot, Backlash, before the start of the 2020 FRC Season. Alongside, Team 3647 Millenium Falcons, Team 971 Spartan Robotics, and Team 5700 SOTA Cyberdragons, we were able to win the tournament!

Team 254 and alliance partners Team 971 climb the HAB at the end of an elims match
Event Summary and Highlights
Robot Performance

Backlash scores cargo into the rocket shop during a quals match
Throughout our qualification matches, we sought to earn the maximum number of ranking points, which meant prioritizing scoring in the rocket in every match to get the rocket RP, as well as climbing and scoring enough points to win. We employed a new rocket RP scoring style that allowed us to utilize our partners well. Since opposing defense was much better at Chezy Champs, we focused on the top two levels of the rocket and let our partners score on the first level. The HAB RP was a bit harder because of the increased point requirement. Thus, we made sure to always climb successfully and also get our partners to park on the platform. We consistently scored double climbs in our matches.
By the elimination period, we focused on simply winning our matches. We scored as many points as possible by scoring as many cargo balls as possible since they were worth more than hatches. We wanted to score enough hatches such that we had multiple points to score at any moment and avoid getting caught up by defense. We ran our cargo ship autonomous program to place hatch panels on the first two side slots of the cargo ship and then filled the rocket during most of our matches. Sometimes, we switched between the task of scoring hatches and cargo with Team 971 to confuse defensive opponents.
Alliance Selection
Going into the elimination period, we chose to form an alliance with Team 3647 Millenium Falcons, Team 971 Spartan Rootics, and Team 5700 SOTA Cyberdragons.

Team 254 representative, Safwaan Khan, poses with our chosen alliance partners
A Special Thanks
At Chezy Champs, we would not have been able to be so successful without the amazing teams that we were able to work with during our matches. Also a special shout out to our pit crew and drive team for properly maintaining our robot during the tournament. We would also like to highlight the efforts of our alliance readiness crew to keep our alliance partners ready throughout the tournament. Team 254 would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, teachers, and parents who supported us and helped us succeed in this tournament.

Members of Team 4183, Bit Buckets Robotics, hold up their newly acquired Chezy Champs swag

254 member, Safwaan Khan, in action as a scorekeeper

Drive team members, Jack Gnibus and Marcus Ma, enthusiastically clean up the field during a lunch break
Hot San Jose Nights 2019
Event Summary
On September 7th, Team 254 appeared at the 11th Annual Hot San Jose Nights at the Reid-Hillview Airport in San Jose, CA to demonstrate our 2019 season robot, Backlash. We talked about our 2019 season, what we do as a robotics team, and how others can get involved in robotics. To entertain some of the kids that came to see our robot, we even played catch with game pieces using our robot. Many of our team members were also able to speak with other parents about the FIRST Program and how their children could get involved. This event allowed us to share our knowledge and experiences with the surrounding community.

Team 254 President, Jack Gnibus, and Members, Marcus Ma and Emiliano Hansen, show Backlash to the surrounding crowd.
Our Experiences
Outreach leader, Safwaan Khan said, “Hot San Jose Nights was an amazing and exciting first event to attend as Outreach Director. Not only did I get to talk about robots, something I love to do, but I also got to interact with both children and adults. I got to show and explain the functions of the robot to children, and I got to explain the processes in which we construct our robot to adults. Overall, the event was a great way to meet and play with others in our community.” Our team allowed visitors to touch our robot and look at it up close, while also answering any of their questions about our robot. In general, people were astonished to see the speed of our robot and how tall it could expand, and several people asked how they could get involved with what FIRST has to offer. Overall, Hot San Jose Nights was an outstanding outreach event and we wish to continue making an impact in our community!
A crowd of onlookers observe Backlash in action!
2019 FRC Deep Dive
Check out our very own Sumi Govindaraju, Daniel George, and Andrew Torrance on First Updates Now’s latest edition of FRC Deep Dive below. If you have any further questions or comments please direct them towards the Chief Delphi thread for this episode.
2019 Technical Resources Release
Team 254 is proud to present the Technical Binder and Code Release for our 2019 Einstein finalist robot, Backlash. If you have any questions, feel free to comment on the respective Chief Delphi threads for our code release and our technical binder release.

2019 FRC World Championship
A Brief Summary
Last week, we attended the 2019 FIRST World Championship in Houston, Texas from April 17th to April 20th. Assigned to the Turing Division, we won the Division Championship Award and the Industrial Design Award sponsored by General Motors.After becoming the Turing Division Champions, we executed a well-planned strategy alongside FRC Team 3310 Black Hawk Robotics, FRC Team 6986 PPT Bots, and FRC Team 948 NRG (Newport Robotics Group), allowing us to earn the second place title at the 2019 FRC World Championship in Houston!

Team 254 poses for a picture at the Hall of Fame Lunch in the George R. Brown Convention Center
Robot Performance
Qualification Matches (Turing Division)
Throughout our qualification matches, we sought to earn the maximum number of ranking points, which meant prioritizing scoring in the rocket in every match to get the rocket RP, as well as climbing and scoring enough points to win. Since we were competing in the 2019 FRC World Championship, most teams could fill a rocket with cargo by themselves or with another team on our alliance, which made our strategy easier to execute. When we were with partners who could manage scoring on the rocket themselves, we primarily worked on distracting defense. Seeing as finishing a rocket is incredibly hard under defense, giving the other teams an open other side of the field allowed them to finish their rocket as we worked on ours. In other matches, where we did not have partners capable of finishing the rocket, we accomplished the task ourselves, while fighting through the defense the best we could. We also made sure to finish each of our matches by climbing onto the HAB, so we could get the HAB docking ranking point. Luckily, we were with many other level 3 climbers, allowing us to stay out in the field longer as they climbed, but we always attempted a double climb for more points with the new climber.
We also kept tiebreaker points in mind during our divisional qualification matches. If there happened to be a tie in ranking points, we always prioritized scoring cargo to boost that metric. It also worked well seeing that cargo balls are worth more than hatch panels.
Alliance Selection
Going into the elimination period in the Turing Division, we chose to form an alliance with FRC Team 3310 Black Hawk Robotics, FRC Team 6986 PPT Bots, and FRC Team 948 NRG (Newport Robotics Group).

Team 254 representative, Brandon Chuang, poses with our chosen alliance partners
Elimination Matches (Turing Division)
During our elimination matches, we focused all our efforts on winning our matches. Since ranking point didn’t matter, we focused on scoring more matchpoints. We put most of our efforts into scoring as many cargo balls as possible, because they were worth more than hatches. We wanted to score enough hatches such that we had multiple points to score at any moment to allow for us to change our scoring location and not get stopped by defense. We ran our cargo ship autonomous program to place hatch panels on the first two side slots of the cargo ship, and then filled the rocket and did any other tasks throughout the rest of the matches.

Backlash with alliance partner, Team 3310, at the end of a match
On the Einstein Field
We generally maintained a similar strategy during the Einstein matches as in theTuring Division elimination round, by placing a larger focus on the number of matchpoints we scored. However, we used the amount of cargo scored was used as a metric in case any matches ended in a tiebreaker. We made it to our final tiebreaker match on the Einstein field and, unfortunately, lost due to an amazing performance carried out by FRC Team 1323 MadTown Robotics, FRC Team 973 Greybots, and FRC Team 5026 Iron Panthers, the Newton Division winners, allowing us to earn the second place title.
A Special Thanks
At the 2019 FIRST World Championship in Houston, we would not have been able to be so successful without the amazing teams that we were able to work with during our matches. Also a special shout out to our pit crew and drive team for properly maintaining our robot during the tournament. We would also like to highlight the efforts of our alliance readiness crew to keep our alliance partners ready throughout the tournament. Team 254 would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, teachers, and parents who supported us and helped us succeed in this tournament.

Members of the Team 254 Pit Crew repair Backlash before an upcoming match

Our drive team poses for a picture on the Einstein Field

An action shot of Team 254’s suction climber at the end of a divisional qualifications match
2019 Silicon Valley Regional Champions!
A Brief Summary
As part of an eventful weekend, we attended the 2019 Silicon Valley Regional, in San Jose, CA. We had a great time at our second tournament of the FIRST Destination: Deep Space Season with our robot, Backlash. We won the Engineering in Excellence Award sponsored by Delphi. Alongside FRC Team 5499 The Bay Orangutans and FRC Team 6418 The Missfits, we were able to win the tournament, earning our 20th Blue Banner at the Silicon Valley Regional!
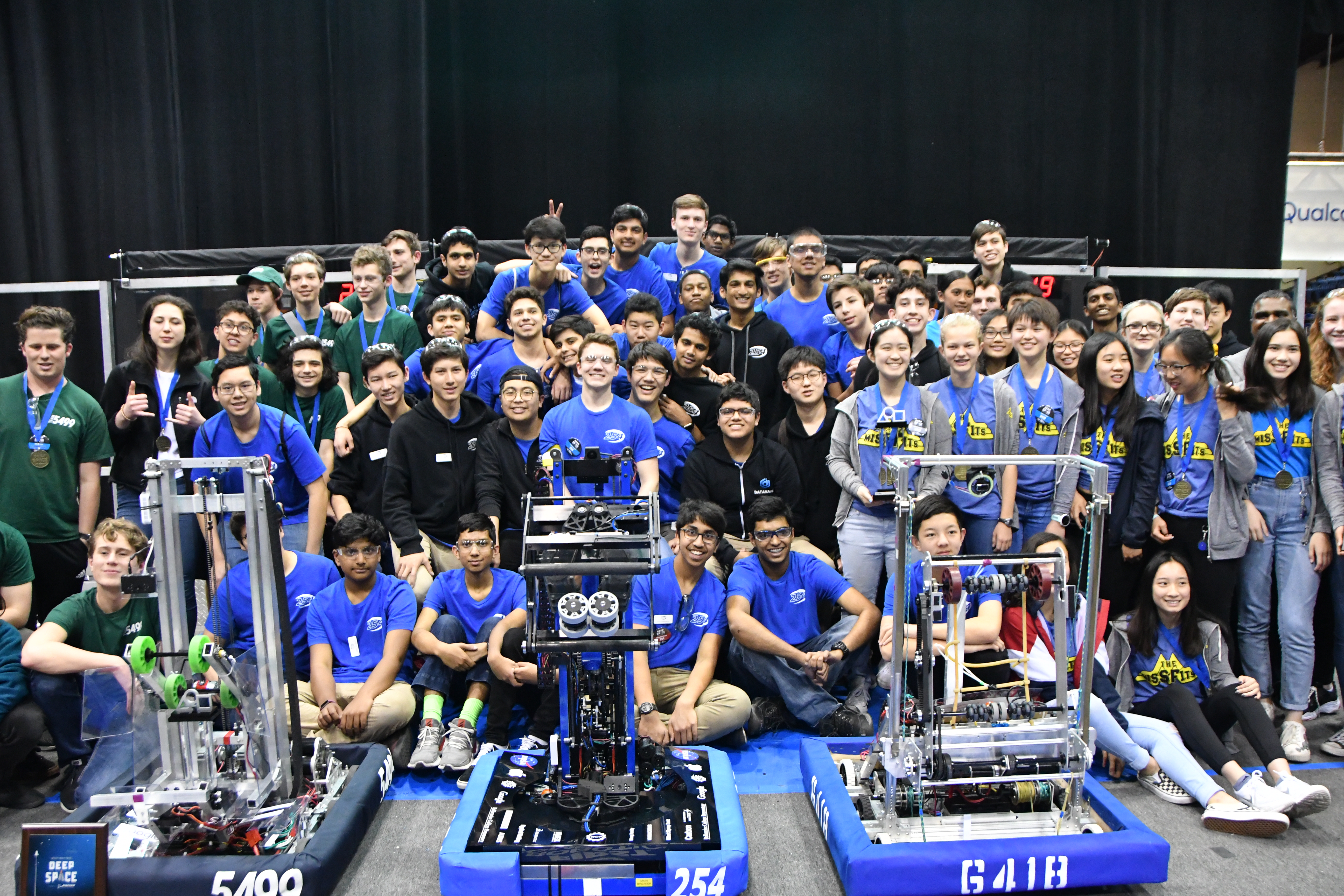
Team 254 and alliance partners Team 5499 and Team 6418 pose for a picture with Backlash after winning at the 2019 Silicon Valley Regional
Robot Performance
Qualification Matches
Throughout our qualification matches, we executed a strategy in which our goals were to fill one full rocket for a ranking point and to climb to level 3 of the HAB zone at the end of every match. We encountered consistent defense from most opposing alliances, resulting in our failure to fill in a rocket in a few matches. We also tried to maximize scoring cargo balls since it was the tiebreaker metric when it came to matches in which each alliance earned the same number of ranking points. We also maximized the amount of cargo balls scored during qualification matches since cargo balls are worth more in point value than hatch disks. At the tournament, we experimented with a new form of counter defense that involved our alliance partners blocking an opposing alliance’s robot to clear a path to the rocket for us to score. We ended up with a record of 9-0-0 during the qualification match period.
Team 254 places a hatch onto the rocket during the tele-operated period
Alliance Selection

Team 254 representative, Brandon Chuang, stands with Team 5499 and Team 6418 as they agree to join our alliance
Going into the elimination period, we were excited to join an alliance with FRC Team 5499 The Bay Orangutans and FRC Team 6418 The Missfits.
Elimination Matches
During the elimination period, we employed a very dynamic, new strategy that involved our robot and Team 5499’s robot to cross paths in order to draw and confuse defense from the opposing alliance. This strategy was employed to maximize our total cargo score. We knew that Team 5499 was great at scoring cargo, so we did our best to open spots for them to score by placing hatches on the lower two levels of the rocket and the front of the cargo ship. Once each of these areas had a hatch in place, we began scoring cargo. This strategy worked well against defense because the crossing of paths by our robot and Team 5499 confused the opposing alliance’s defense robot. Team 6418 did a great job focusing on playing heavy defense on the opposing alliance.

Team 254 and alliance partners Team 5499 and Team 6418 climb onto the HAB Zone at the end of an eliminations match
A Special Thanks
At the Silicon Valley Regional, we would not have been able to be so successful without the amazing teams that we were able to work with during our qualification and elimination matches. Also a special thanks for our pit crew and drive team for properly maintaining our robot during the tournament. A big thank you to the chairman’s presentation team for handling our team’s Chairman’s Presentation in front of a panel of FIRST Judges. Team 254 would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, teachers, and parents who helped us succeed in this regional.
Our alliance readiness crew assists Team 6241 in before an upcoming qualifications match
Members of Team 254 are congratulated by judges after winning the Engineering in Excellence Award at the 2019 Silicon Valley Regional

Team 254 Driver, Jack Gnibus, celebrates the regional victory with mentor, Joey Diamond
2019 San Francisco Regional Champions!
A Brief Summary
As part of an eventful weekend, we attended the 2019 San Francisco Regional, in San Jose, CA. We had a great time at our first tournament of the FIRST Destination: Deep Space Season with our robot, Backlash. We won the Innovation In Control Award sponsored by Rockwell Automation for our code. Alongside FRC Team 971 Spartan Robotics and FRC Team 5700 SOTA Cyberdragons, we were able to win the tournament, earning another Blue Banner!

Team 254 poses for a picture with Backlash after winning at the 2019 San Francisco Regional
Robot Performance
Qualification Matches
Throughout our qualification matches, we executed a strategy in which our goals were to fill one full rocket for a ranking point and to climb to level 3 of the HAB zone at the end of every match. We encountered consistent defense from most opposing alliances, resulting in our failure to fill in a rocket in a few matches. We also tried to maximize scoring cargo balls since it was the tiebreaker metric when it came to matches in which each alliance earned the same number of ranking points. We also maximized the amount of cargo balls scored during qualification matches since cargo balls are worth more in point value than hatch disks. We ended up with a record of 10-1-1 during the qualification match period.

Team 254 places a cargo ball into the cargo ship during the tele-operated period
Alliance Selection

Team 254 representative, Brandon Chuang, stands with Team 5700 as we join Team 971 in an alliance
Going into the elimination period, we were excited to join an alliance with FRC Team 971 Spartan Robotics and FRC Team 5700 SOTA Cyberdragons.
Elimination Matches
Our main goal was to draw defense away from Team 971’s robot, allowing Team 971 to focus on scoring cargo balls. This strategy gave us the opportunity to score more points, since filling up the rocket did not give our alliance an advantage during the elimination period. Though we focused on distracting defense from the opposing alliance, we scored a few hatches for extra points. By scoring hatches on the rocket, we also opened up more options for Team 971 to score cargo balls. If we encountered particularly hard defense, we always had the option of scoring a hatch on level 1 of the rocket and getting around the defense later. This strategy allowed us to continuously have a lead during the match. In endgame, we climbed to either level 2 or level 3 of the HAB. Whenever we chose to execute a double climb, both our robot and Team 971’s robot climbed to level 3 of the HAB. During single climbs, Team 971 focused on level 3 of the HAB while we focused on climbing to level 2 of the HAB.

Team 254 and alliance partners Team 971 and Team 5700 load onto the HAB Zone before an upcoming eliminations match

Our alliance readiness crew assists Team 5700 in before an upcoming eliminations match
A Special Thanks
At the San Francisco Regional, we would not have been able to be so successful without the amazing teams that we were able to work with during our qualification and elimination matches. Also a special thanks for our pit crew and drive team for properly maintaining our robot during the tournament. A big thank you to the chairman’s presentation team for handling our team’s Chairman’s Presentation in front of a panel of FIRST Judges. Team 254 would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, teachers, and parents who helped us succeed in this regional.

Members of Team 254 cheer enthusiastically after winning a regional
Team 254 Business Development Director, Suraj Roy, discusses our business plan with a judge for the Entrepreneurship Award
Team 254 Presents: Backlash
Team 254 presents our 2019 entry into the FIRST Robotics Competition: Backlash. Backlash will be competing at the San Francisco Regional, followed by the Silicon Valley Regional and the FIRST Championship in Houston. More information on the robot.
Madtown Throwdown Offseason Tournament
A Brief Summary
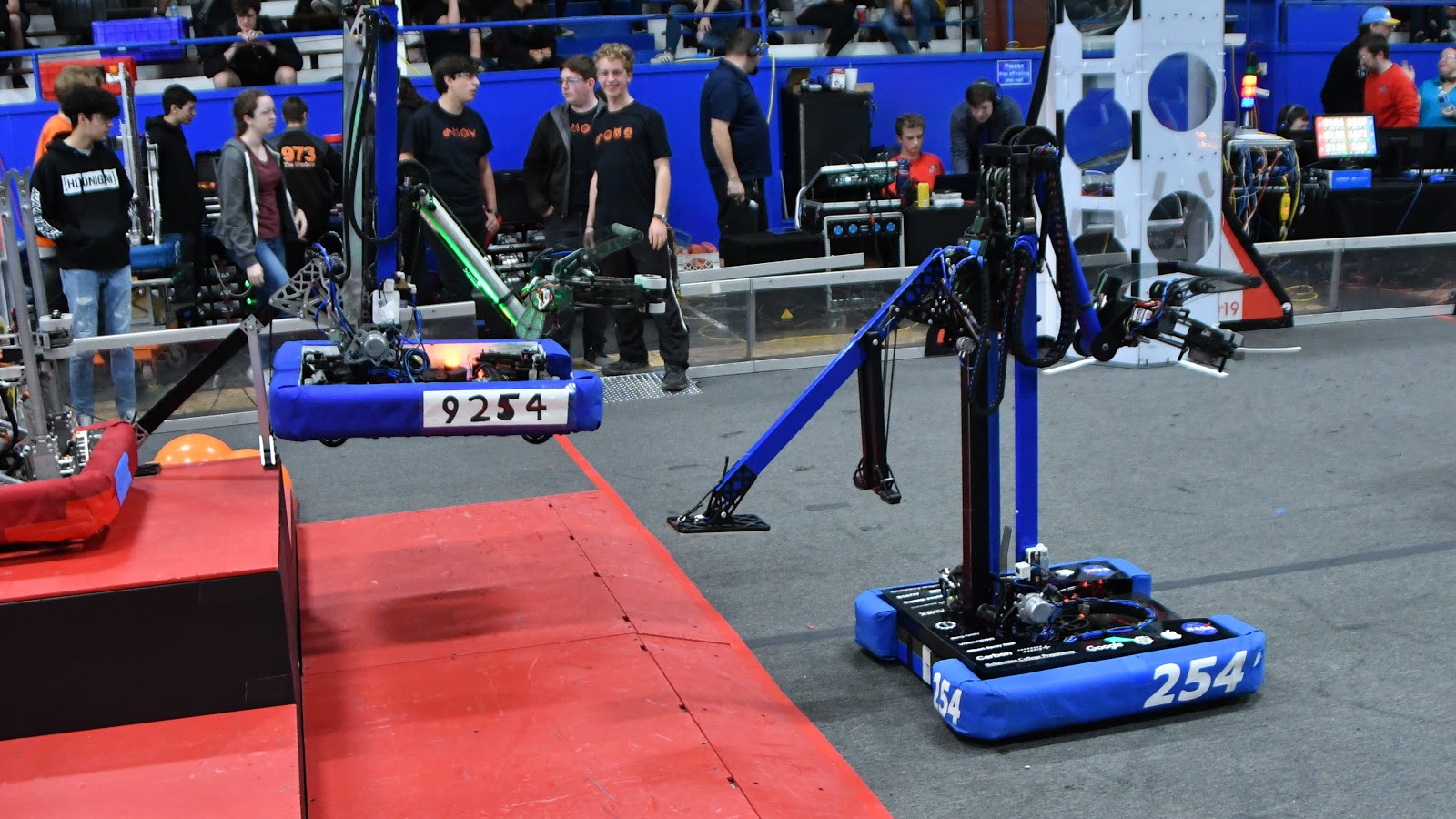
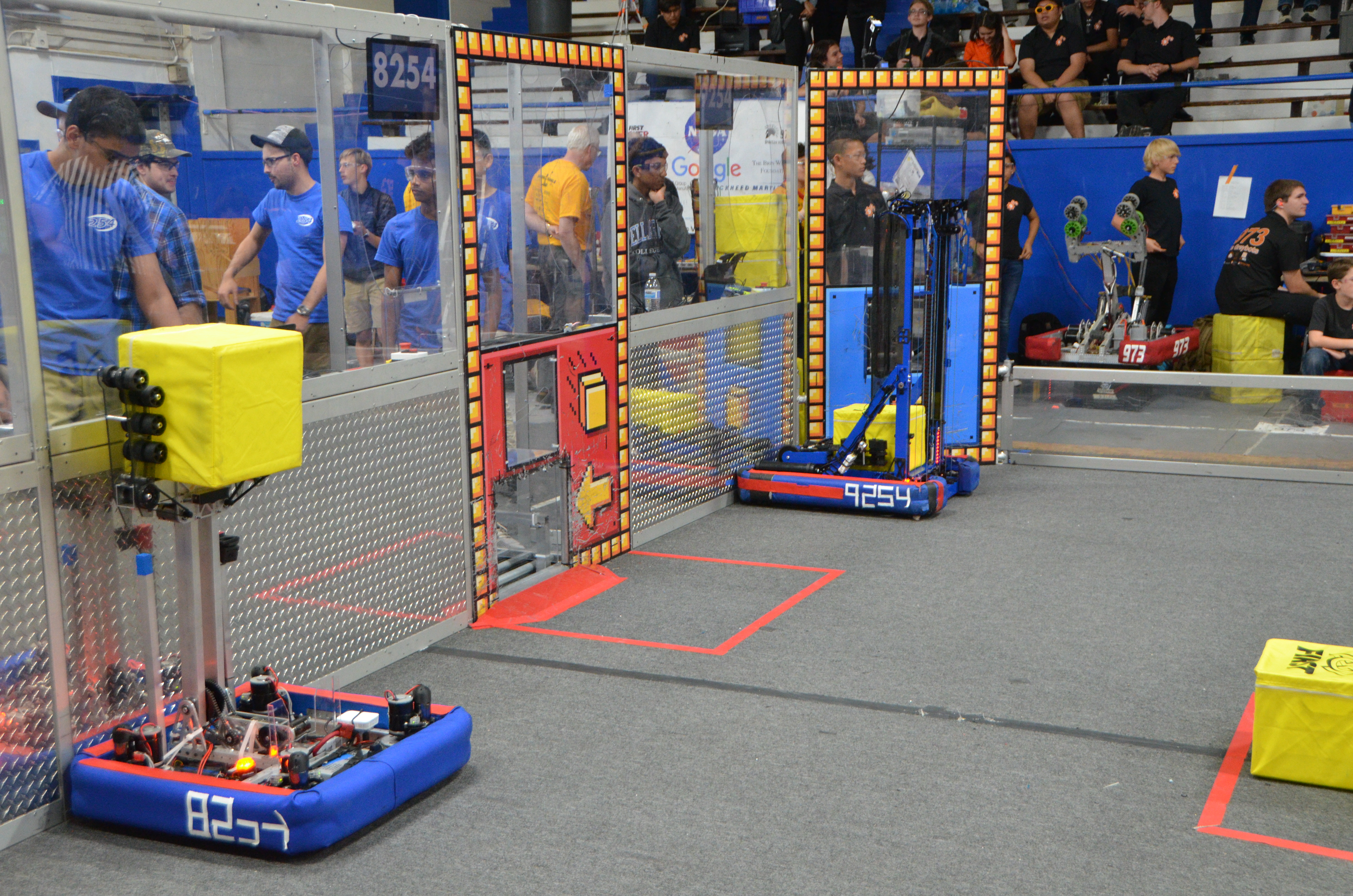
As part of an eventful weekend, we attended Madtown Throwdown, an annually hosted offseason tournament hosted by Team 1323 (Madtown Robotics), in Madera, CA. We had a great time jumping back into action with our robot, Lockdown, before the start of the 2019 FRC Season. Alongside, FRC Team 1323 MadTown Robotics, their offseason robot (9323), and our own programming robot (9254), we were able to win the tournament!

Team 254 and alliance partners Team 1323 and our programming robot 9254 in position before an elims match
Event Summary and Highlights
General Summary
Overall, Madtown Throwdown was a great event for our team. Lockdown, our competition robot, went undefeated 15-0. Our programming robot, was run by an all-freshman pit crew and drive team to ensure that our new members gain a valuable experience before the 2019 FRC Season. The programming robot had a great qualifications match record and was lucky to join Lockdown in an alliance at the tournament. We also had a swerve robot, which we worked on all summer, with a 3-person pit crew, which finished 2nd to last place in the tournament. With rotating pit crews and drive teams, all team members were able to gain some valuable technical experience at the tournament.
Programming Robot Drive Team Members, Abhinav Nallapa and Dylan Shumba, are seen in action
Robot Performance
Competition Robot Strategy
During qualification matches, we aimed to earn all 4 ranking points. In order to to reach this goal, we had to run our switch autonomous program. We also fought to achieve scale dominance as early as possible during the match to allow for time to shore up our own switch/exchange, attack the opposing alliance’s switch, and hang at the end of the match. We generally went for the scale first and peeled off to either our own switch or the opposing alliance’s switch whenever needed.
During alliance selection, we partnered with Team 1323 Madtown Robotics, their offseason robot (9323), and our own programming robot (9254). During the elimination matches, we worked with Team 1323 and ran our dual autonomous program to gain dominance over the scale, while ensuring ownership of our switch as well. Lockdown and 1323’s competition robot focused on scale ownership, and 1323’s competition robot would fall back for defense whenever necessary. When we had a headstart on the scale, Lockdown would attack the opponent switch, as seen during quarterfinals and semifinals. 1323’s competition robot hung at the end of the match, but we did not pursue a buddy climb since the other two robots were unable to climb onto our forks.
Programming Robot Strategy
During the qualification matches, our programming robot played a supportive role and generally tried to get a few cubes scored in its switch, scale, and exchange. However, during the elimination matches, our programming robot functioned as a switch/exchange robot to ensure that we had enough cubes to use the levitate powerup. We also chose to defend robots from the opposing alliance when given the opportunity.
Summer Project Robot Strategy
During the qualifications matches, our summer project robot functioned as a switch/exchange robot to defend our own switch and make sure there were cubes in our vault. Sometimes, we would also attack our opponent’s switch. Unfortunately, our swerve robot was not chosen during the elimination period.
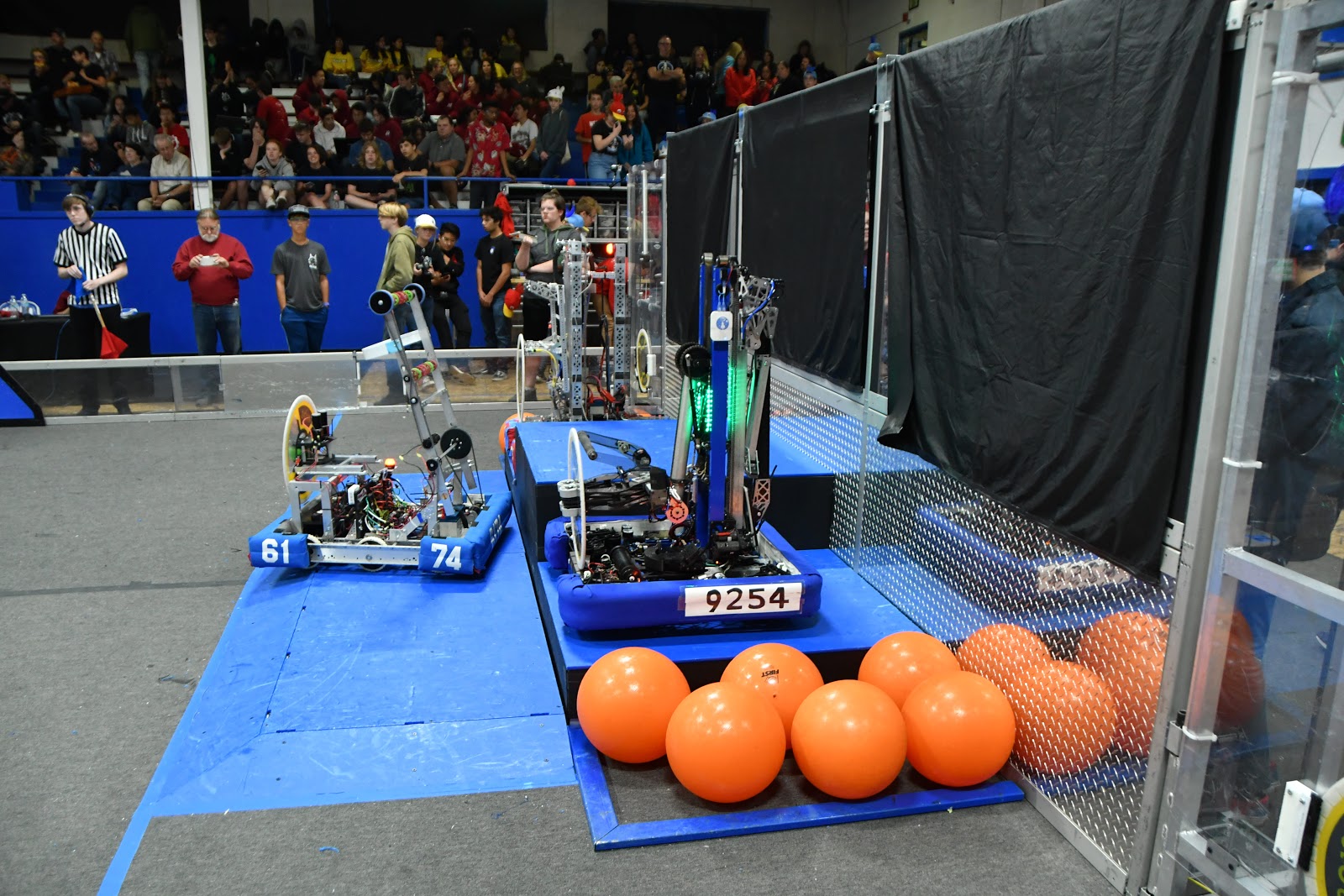
Lockdown and our Summer Project Robot in position before a qualification match
A Special Thanks
Since this was Team 254’s third time attending Madtown Throwdown, we would like to say thank you to Team 1323 (Madtown Robotics) for hosting the tournament and making us feel welcome!

Some new members on Team 254 celebrate the team’s victory
Capital City Classic 2018
A Brief Sumary
As part of an eventful weekend, we attended Capital City Classic, an annually hosted offseason tournament hosted by Team 1678 (Citrus Circuits), in Davis, CA. We had a great time jumping back into action with our robot, Lockdown, before the start of the 2019 FRC Season. Alongside, FRC Team 1323 MadTown Robotics, FRC Team 199 Deep Blue, and FRC Team 3859 Wolfpack Robotics, we were able to win the tournament!

Team 254 Members pose with their alliance partners and fellow champions
Event Highlights
General Summary
Team 254 hangs at the end of a quarterfinals match
Overall, Capital City Classic was a great event for our team. After ending with a record of 15-0, our team members were excited throughout the tournament. With an 8 person pit crew and drive team, we were very effective and made sure the rest of our team members were at home working on our summer project robot to prepare to Madtown in 2 weeks.
Robot Performance
In general, we prioritized ranking points throughout the event. Since many robots at the event did not focus on the scale, we adopted a strategy of aggressive offense where we would score on our opponent’s switch. We would also focus on maintaining ownership of the scale and climbing at the end of the match for the extra ranking point. We ended up seeding first with 31 ranking points over 9 matches.
During Alliance Selection, we chose to form an alliance with Team 1323 since they had a great scale robot that could really help us establish a lead during auton. To accompany two strong scale robots we looked for two robots skilled in locking down the switches and exchange, like Team 199 and Team 3859.
During elims, we worked with Team 1323 to lock down ownership of the scale during auton. If necessary, Team 1323 would focus on offense towards the opposing alliance’s switch. During finals, we did have some scale competition with team Team 1678 and Team 1425 on the opposing alliance. Thus, we played more conservatively and made sure we had a solid buffer on the scale before rotating to other tasks. We would also like to recognize the opposing alliance of Team 1678 (Citrus Circuits), Team 1425 (Error Code Xero), Team 5458 (Digital Minds), and Team 4171 (BayBots).

Members of the Team 254 Pit Crew repair Lockdown before an upcoming Finals Match
A Special Thanks
Since this was Team 254’s first time at Capital City Classic, we would like to say thank you to Team 1678 (Citrus Circuits) for hosting the tournament and making us feel welcome.
Chezy Champs 2018
A Brief Sumary
As part of an eventful weekend, we hosted Chezy Champs, our annually hosted offseason FRC tournament at Bellarmine College Preparatory, in our hometown of San Jose, CA. We had a great time jumping back into action with our robot, Lockdown, before the start of the 2019 FRC Season. Alongside, FRC Team 1678 Team Citrus Circuits, FRC Team 649 M-SET Fish, and FRC Team 2557 SOTAbots, we were able to win the tournament!

Robot Performance

Lockdown faces some competition in scoring on the scale
Throughout the qualification matches, we had a very loose strategy. We had a new drive team for this year, so we were very relaxed in our approach to the game and generally focused scoring on the scale. Though we lost a few quals matches and did not seed first, we were chosen to join an alliance with generous Team 1678 (Citrus Circuits). During elims, we had scale-heavy matches and switch-heavy matches. During our scale-heavy matches, we worked with Team 1678 to score on the scale until we had a substantial lead. After focusing on the scale, we would divert our attention to our switch or attack our opponent’s switch of necessary. For finals, our objective was to build a solid lead after auto and then maintain ownership of the scale. We ensured that we completed this objective by placing all of the switch fence cubes on the scale. Whenever we had a lead on the scale, 1678 would maintain it and we would do our best to slow Team 1323 down by attacking opponent switch and disrupting their pyramid-scale cycles. We would like to congratulate the winning alliance of Team 3310 (Black Hawk Robotics), Team 1323 (MadTown Robotics), Team 2659 (RoboWarriors), and Team 1538 (The Holy Cows).
Team 254 Members show Lockdown to a visitor
A Special Thanks
Chezy Champs was very special this year due to the efforts of so many people and organizations. Team 254 would like to thank our friends from RoboSports Network (RSN) for providing our audience with such a great analysis of each match and team at the tournament. We would also like to thank all the volunteers, who helped make Chezy Champs possible. It was truly an incredible experience to host an offseason tournament attended by so many talented teams, even those who chose to attend from out of state, and to make new friends and catch up with old ones too!
2018 Technical Resources Release
Team 254 is proud to present the Technical Binder, Code Release, and Blog Release for our 2018 World Champion winning robot, Lockdown. If you have any questions, feel free to comment on the Chief Delphi thread for our code release and our technical binder release.

2018 World Champions!
A Brief Summary
As part of an eventful week, we attended the 2018 FIRST World Championship in Houston, Texas from April 18th to April 21st. Assigned to the Hopper Division, we won the Division Championship Award and the Autonomous Award sponsored by Ford, for our 4 cube scale autonomous program and scale detection software. After becoming the Hopper Division Champions, we executed a well-planned strategy alongside FRC Team 148 Robowranglers, FRC Team 2976 Spartabots, and FRC Team 3075 Ha-Dream Team, allowing us to win our 4th world championship and finish with an undefeated season!
Team 254 poses for a picture after winning at the 2018 FIRST Championship in Minute Maid Park
Robot Performance
Qualification Matches (Hopper Division)
Throughout our qualification matches, we wanted to make sure that we secured 4 ranking points during every match, while still gaining control of our scale for as long as possible. In order to do this, we ran our scale autonomous program, which placed 3-4 cubes on our alliance’s scale or, when we were not confident with our alliance partners’ ability to place cubes on the switch, we executed our autonomous program which placed cubes on the switch and scale.
Alliance Selection
Going into the elimination period in the Hopper Division, we chose to form an alliance with FRC Team 148 Robowranglers, FRC Team 2976 Spartabots, and FRC Team 3075 Ha-Dream Team.

Team 254 representative, Weston White, poses with our chosen alliance partners
Elimination Matches (Hopper Division)
During the elimination matches in the Hopper Division, we maintained our undefeated record for the entire tournament. From a strategic perspective, we aimed to always have possession of the scale and our own switch while also placing cubes on our opponent’s switch. This strategy allowed us to gain a significant lead during each match and stopped the opposing alliance from being able to score from their own switch. We would also like to thank Team 3075 Ha-Dream Team for helping our alliance during Finals Match 2 in the Hopper Division, while Team 2976’s robot was undergoing some repairs. Through the efforts of our alliance partners, we were able to win the Hopper Division. We also won the Autonomous Award sponsored by Ford, for our unique 4 cube scale autonomous program and scale detection software!

Lockdown hangs with alliance partner, Team 2976, at the end of a match
On the Einstein Field
We generally maintained a similar strategy during the Einstein matches as in the Hopper Division elimination round, by placing cubes on both switches and keeping possession of the scale. Team 2976 Spartabots played awesome defense on the portals to slow down the opposing alliance’s cube flow after they used all the cubes from their switch fence. Team 148 Robowranglers attacked the opposing alliance’s switch to force them to cover their switch before attacking our switch or the scale. Our drive team chose not to prioritize powerups, by placing only 3-4 cubes in our exchange for the levitate or boost powerup. With this strategy, we placed first during the round robin matches, allowing us to move on to Finals, with the Carver Division winners. We would like to shout out FRC Team 2910 Jack In The Bot, FRC Team 4911 Cyberknights, FRC Team 4499 The Highlanders, and FRC Team 5006 Apophis, the Carver Division winners, for executing a great strategy while playing against us on the Einstein Field.

Lockdown works to place a cube on the opposing alliance’s switch
A Special Thanks
At the 2018 FIRST World Championship in Houston, we would not have been able to be so successful without the amazing teams that we were able to work with during our matches. Also a special shout out to our pit crew and drive team for properly maintaining our robot during the tournament. We would also like to highlight the efforts of our alliance readiness crew to keep our alliance partners ready throughout the tournament. Team 254 would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, teachers, and parents who supported us and helped us succeed in this tournament.
Members of the Team 254 Pit Crew repair Lockdown before an upcoming match

Members of the Team 254, 148, 2976, and 3075 drive team strategize before an upcoming match

Our drive team poses for a picture on the Einstein Field

Members of the Team 254 Alliance Readiness Crew assist Team 6014
2018 Silicon Valley Regional Champions!
A Brief Summary
As part of an eventful weekend, we attended the the 20th Silicon Valley Regional, in San Jose, CA. We had a great time at our second tournament of the FIRST Power Up Season with our robot, Lockdown. We won the Innovation In Control Award sponsored by Rockwell Automation for our autonomous code. Congratulations to one of our mentors, Nick Hammes, for winning the Volunteer of the Year award, for his hard work emceeing and in planning this wonderful event! Alongside FRC Team 973 The Greybots and FRC Team 2367 Lancer Robotics, we were able to win the tournament, earning our 50th Blue Banner!
Team 254 poses for a picture with Lockdown after winning at the 2018 Silicon Valley Regional
Robot Performance
Qualification Matches
Throughout our qualification matches, we executed a variety of autonomous programs to ensure we were prepared for various situations. This allowed us to either place 3 cubes in the switch or place 3 cubes on the scale. When on an alliance with robots that were good at placing cubes on the scale, we had to make sure we maintained ownership of the scale before placing cubes on ours’ or our opponent’s switch. We always tried to position ourselves on the scale platform to have enough time for hanging. During the qualification match period, we gained 4 ranking points in each match.
Team 254 places a cube on the scale during the autonomous period
Alliance Selection
Going into the elimination period, we chose to form an alliance with FRC Team 973 The Greybots, FRC Team 2367 Lancer Robotics.

Team 254 representative, Weston White, stands with Team 973 and Team 2367 as they agree to join our alliance
Elimination Matches
By choosing Team 973, a great scale robot, and Team 2367, a great switch and exchange robot, we were able to follow a more flexible strategy. During the elimination matches, Team 973 worked with us to lock down the scale, while Team 2367 focused on keeping ownership of our switch and delivering cubes to our exchange station. To create a head start on scoring cubes onto the scale, we used our 3 cube scale autonomous program. If our opponents were good scoring on the scale, we joined 973 in maintaining ownership of the scale. When our autonomous program was successful, we worked on maintaining ownership of our opponent’s switch, using cubes from our portal. Team 2367 executed flawless and well-timed defense against the opposing alliance. With an organized strategy and great alliance partners, we remained undefeated for the season, allowing us to become the first-place alliance at the tournament and win our 50th blue banner!
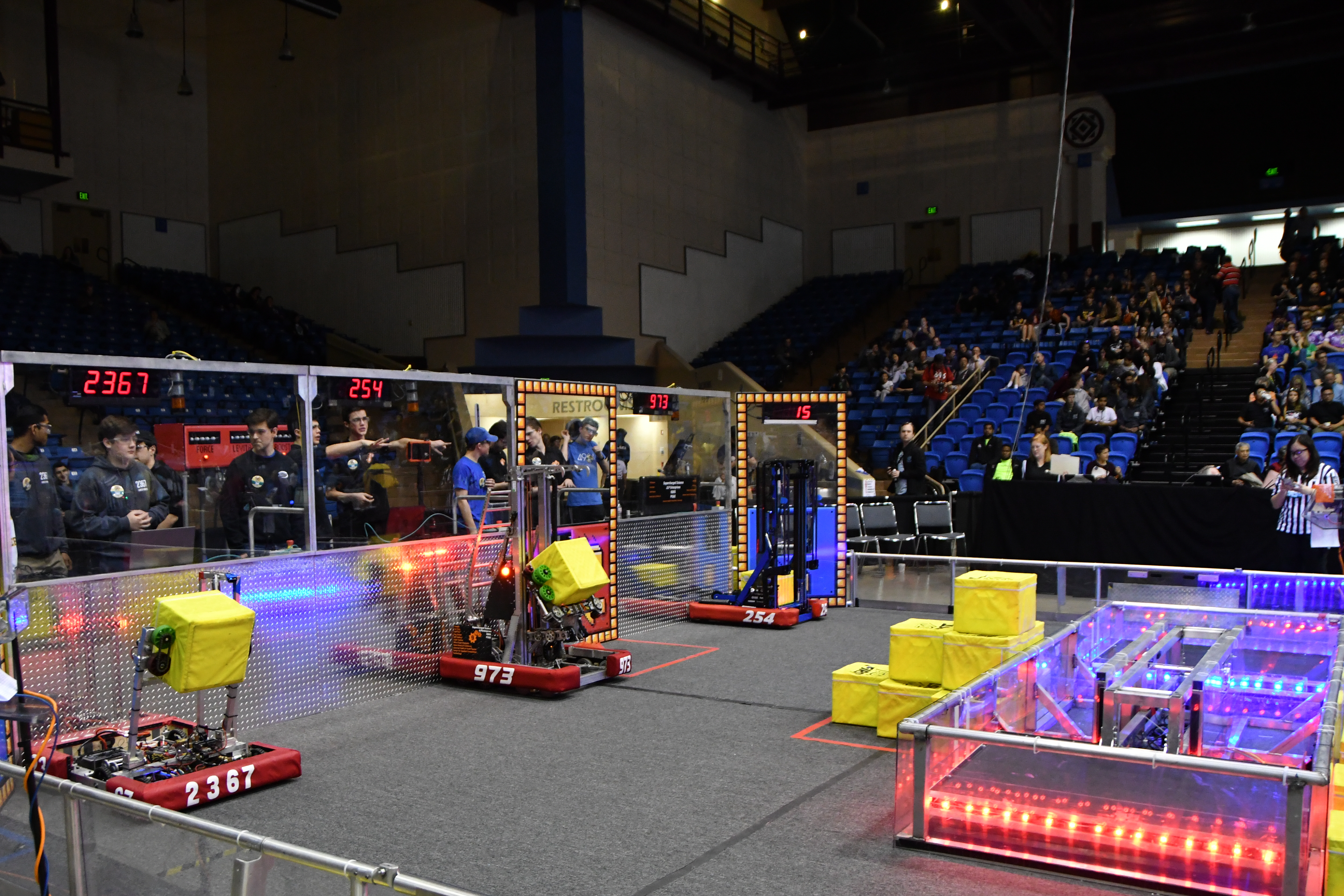
Team 254 and alliance partners Team 973 and Team 2367 stand together during Semifinals Match 1
Helping Other Teams
The Alliance Readiness Crew worked hard throughout the tournament to assist Team 6688 West Valley Middle College Robotics and Team 7317 Crusader Crew. Our crew helped improve the design of Team 6688’s exhaust system, used for delivering cubes to the switch, safely wire their control system, fix their pneumatics so that there were no leaks, and write an auto that could put cubes into the correct side switch. When Team 7317 needed help, our crew worked to create a new and improved intake system to collect and deliver cubes to the exchange. Through this experience, students were able to make friends and get more hands on with designing an actual robot.

Our alliance readiness crew assists Team 7317 in mounting hardstops for a newly designed intake
A Special Thanks
At the Silicon Valley Regional, we would not have been able to be so successful without the amazing teams that we were able to work with during our qualification and elimination matches. Also a special thanks for our pit crew and drive team for properly maintaining our robot during the tournament. A big thank you to the chairman’s presentation team for handling our team’s Chairman’s Presentation in front of a panel of FIRST Judges. Team 254 would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, teachers, and parents who helped us succeed in this regional.

Members of the Team 254 Drive Team repair Lockdown with a mentor before an upcoming match

Our drive team discusses a possible strategy before a tense eliminations match

Excited Team 254 members receive the team’s 50th blue banner
2018 Arizona North Regional Champions!
A Brief Summary
As part of an eventful weekend, we attended the Arizona North Regional, for the very first time, in Flagstaff, AZ. We had a great time starting off the FIRST Power Up Season with our robot, Lockdown. Alongside FRC Team 842 Falcon Robotics and FRC Team 2403 Plasma Robotics, we were able to win the tournament!

Team 254 poses for a picture with Lockdown after winning at the 2018 Arizona North Regional
Robot Performance
Qualification Matches
Throughout our qualification matches, we used an experimental strategy by testing out which of our autonomous programs worked best during a match. From this experimentation, we concluded that it would be best to use our autonomous program, which scored 2-3 cubes on the scale, to establish an early lead in a match. This autonomous program helped us gain ownership of the scale, but we had to focus more on maintaining ownership of the switches rather than the scale. Whenever we had alliance partners who could not secure the switch consistently, we ran our autonomous program for the switch to help our alliance partners before the tele-op period. During every match, we hung with our partners and used the levitate power up for an extra ranking point. By the end of the qualification match period, we were seeded first and had a undefeated record.

Team 254 and alliance partner Team 1011 work together to hang during Qualification Match 86
Alliance Selection
Going into the elimination period, we chose to form an alliance with FRC Team 842 Falcon Robotics, FRC Team 2403 Plasma Robotics.

Team 254 representative, Brandon Chuang, greets Team 842 as they agree to join our alliance
Elimination Matches
During the elimination matches, we maintained our undefeated record for the entire tournament. Our autonomous program and Team 842’s robot, worked to score on the scale during each match. This allowed us to score on switches, while Team 842 covered the scale during the tele-op period. We also focused on stopping our opponents from gaining ownership of their own switch. If we had spare time during a match, we passed cubes through the exchange. Team 2403’s robot worked to gain ownership of our own switch and we also helped with scoring cubes in our switch. During finals, Team 2403 focused on switch, exchange, and defense against opponents who tried to take ownership of our switch. With an organized strategy and great alliance partners, we scored an all-time high of 594 points in Finals Match 2, allowing us to become the first-place alliance at the tournament!
Helping Other Teams
The Alliance Readiness Crew worked hard throughout the tournament to assist Team 6585 Hózhóogo Naasháa Doo and Team 6656 Ryu Botics. When Team 6656 needed an intake, our crew searched for the necessary parts and mounted a simple 2-wheel intake onto their robot. In addition, we helped them write an autonomous mode that crossed the auto line consistently. When Team 6585 needed a robot, our crew worked for 3 days to build and wire a drivebase, 2-wheel intake, and a polycarbonate box for collecting cubes from the portal. Through this experience, students were able to make friends and get more hands on with designing an actual robot.

Our alliance readiness crew assists Team 6585 in mounting a newly designed intake
A Special Thanks
At the Arizona North Regional, we would not have been able to be so successful without the amazing teams that we were able to work with during our qualification and elimination matches. Also a special thanks for our pit crew and drive team for properly maintaining our robot during the tournament. A big thank you to the chairman’s presentation team for handling our team’s Chairman’s Presentation in front of a panel of FIRST Judges. Team 254 would also like to thank all the volunteers and judges that made this tournament an exciting experience, and all of our mentors, teachers, and parents who helped us succeed in this regional.

Members of the Team 254 Pit Crew repair Lockdown before an upcoming match

Our drive team works together during a tense eliminations match

Spirited Team 254 members cheer excitedly for their alliance
